

Multi-innovation anti-interference filtering method in face pose cooperative system
A collaborative system and pose technology, applied in the field of filtering, can solve the problem of high noise in face pose calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0063] Embodiment 1: a kind of multi-innovation anti-interference filtering method under the collaborative system of face pose and pose, concrete steps are as follows:
[0064] (1) Build a face pose collaboration platform, including motion controllers, industrial cameras, servo motors, stepper motor drivers, and sensors;
[0065] (2) Use industrial cameras to collect face images, calculate face pose changes, establish filter models through motion equations, determine transfer matrix F and measurement matrix C, and assume initial values and The relative pose change Y of the face relative to the camera t ;
[0066]
[0067] Change the face pose to Y t As the filter input quantity, the translational change of the x-axis and y-axis at time t and the rotation change around its x-axis and y-axis, as well as the speed of translation and rotation change constitute the filter state quantity X t ;
[0068]
[0069] (3) According to the filtering results at the previous mome...
Embodiment 2
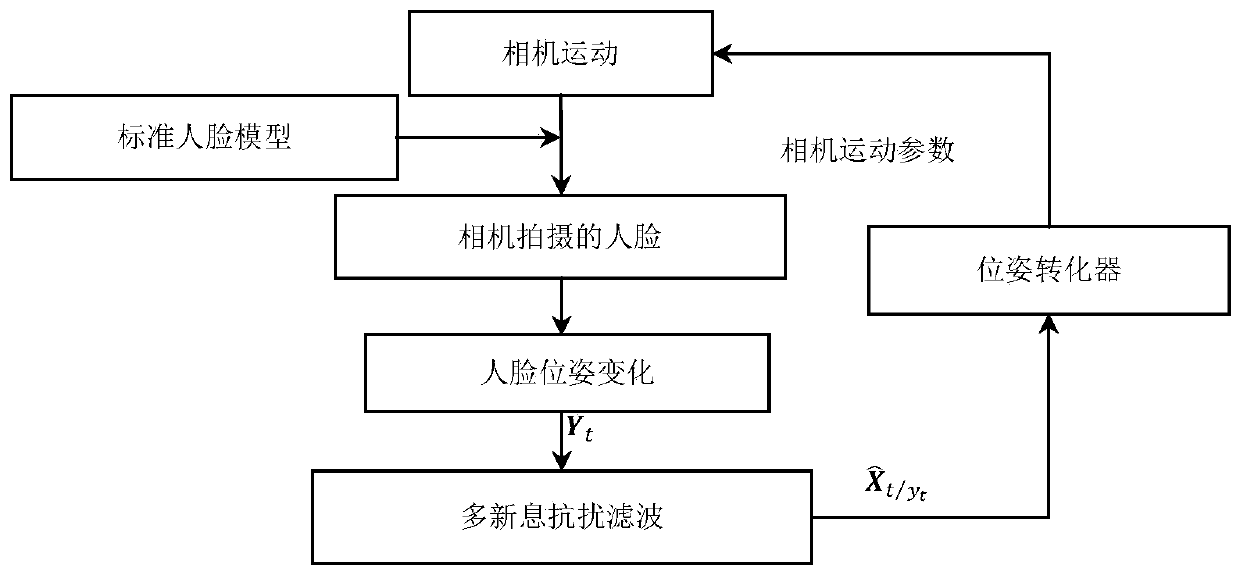
[0111] Embodiment 2: a kind of multi-innovation anti-jamming filtering method under the collaborative system of face pose (see image 3 ),Specific steps are as follows:
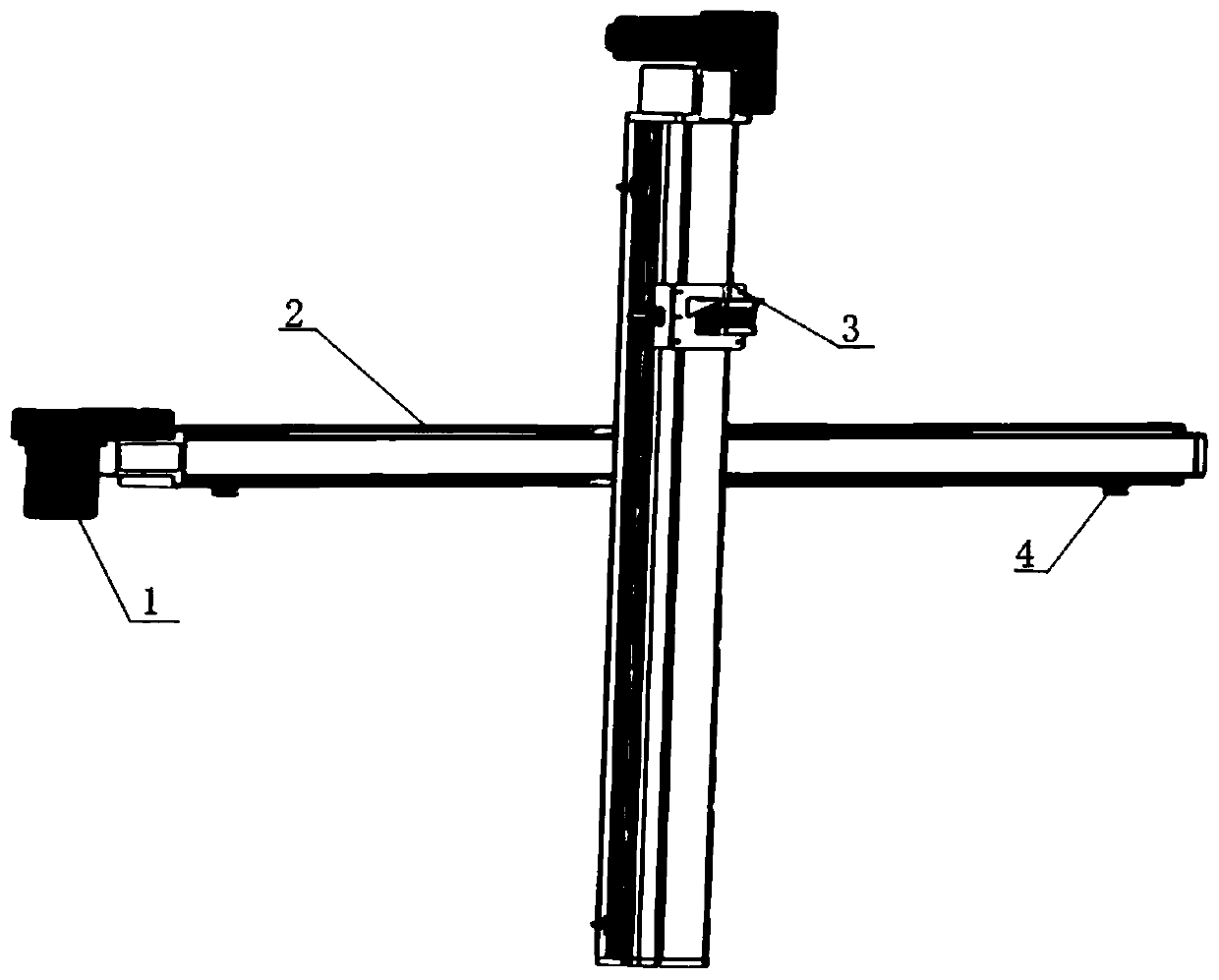
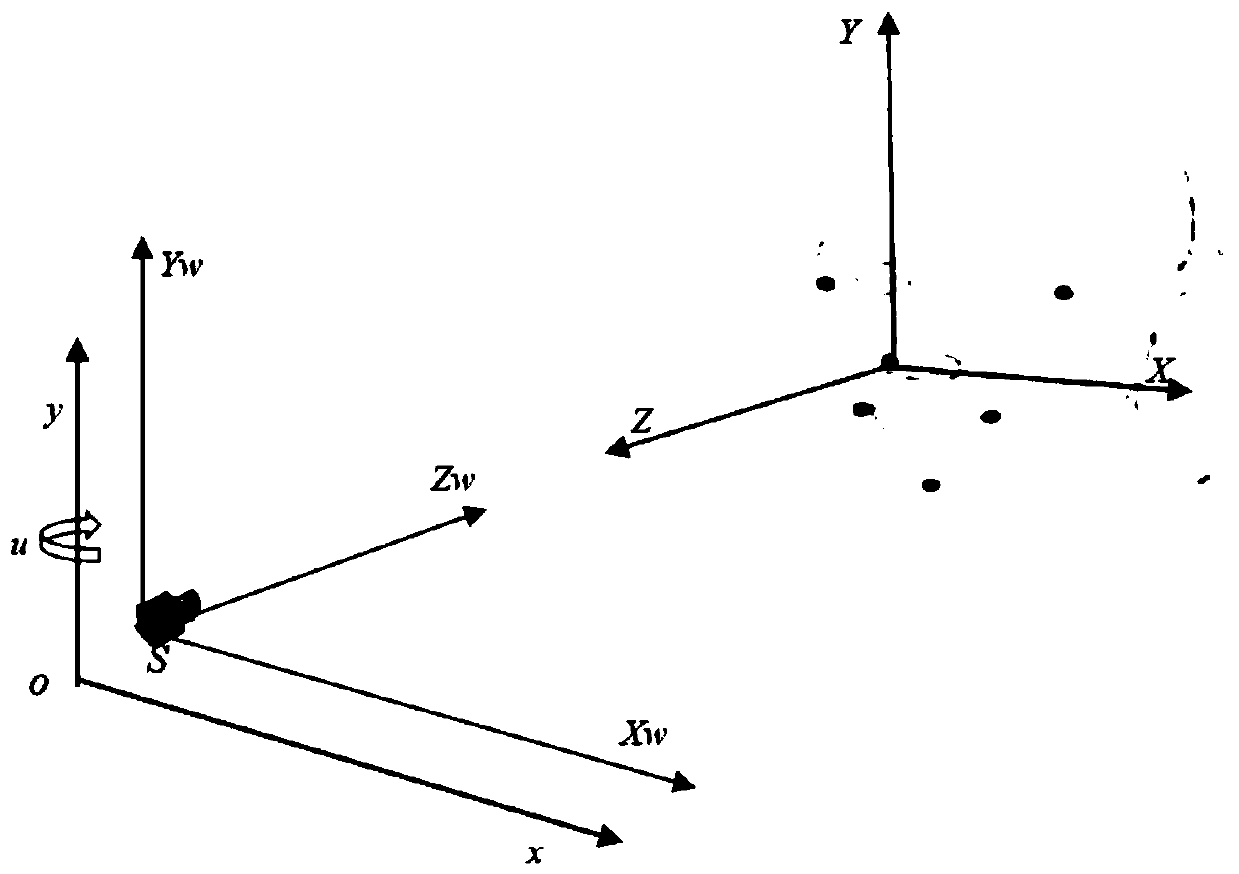
[0112] (1) Build a three-axis pose coordination system based on industrial cameras, motion controllers, connecting cables, wiring boards, servo motors and other devices (see figure 1 ); establish motion control axis coordinate system, camera coordinate system and face coordinate system (see figure 2 );
[0113] (2) Use industrial cameras to collect face images, calculate face pose changes, establish filter models through motion equations, determine transfer matrix F and measurement matrix C, and assume initial values and
[0114] The face detection method based on the hog feature detects the face area and extracts the face feature points. According to the photogrammetry method combined with the least squares algorithm, the pose change of the camera relative to the face at time t is calculated. The rela...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More