

Autonomous automobile guidance and trajectory-tracking
An automatic guidance, automotive technology, applied in the direction of motor vehicles, vehicle components, road network navigators, etc., can solve problems such as lack of stability and limited performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
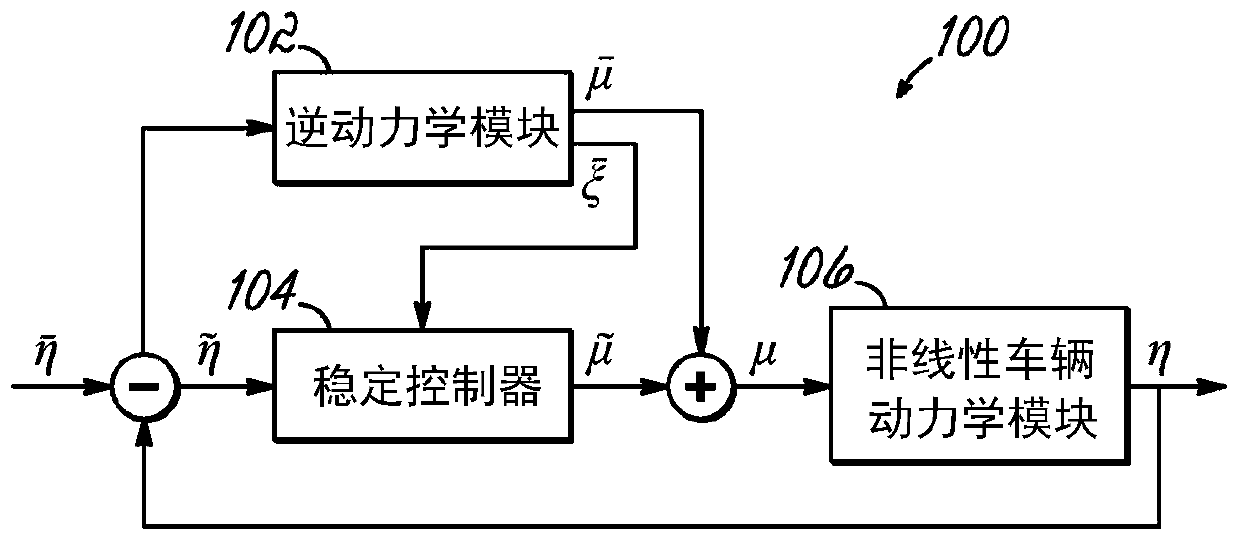
[0048] Embodiments of the invention include a control system for an autonomous automobile-like ground vehicle that provides vehicle motion control with three degrees of freedom (3DOF). 3DOF vehicle motion control faces several challenges. For example, vehicle rigid body, tire traction, and various drag force models are highly nonlinear. Another challenge is that tracking error dynamics along time-dependent trajectories are usually time-varying even though vehicle dynamics / kinematics properties can be considered time-invariant. Furthermore, car-like ground vehicles are subject to nonholonomic kinematic constraints, which further require time-varying and non-smooth guidance and control algorithms.
[0049] 3DOF motion control can be classified into path following and trajectory tracking. Path following only requires the vehicle to follow a specified path without time constraints. Therefore, the path-following controller system only needs to deal with vehicle kinematics / kinema...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More