

Intelligent agricultural machinery navigation system and method based on machine vision
A machine vision and navigation system technology, applied in navigation calculation tools, photo interpretation, camera devices, etc., can solve problems such as continuous adjustment of feature thresholds, crop damage, rolling of agricultural machinery, etc., to improve navigation accuracy and stability, and guarantee effect of effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention is further described below in conjunction with accompanying drawing and embodiment:
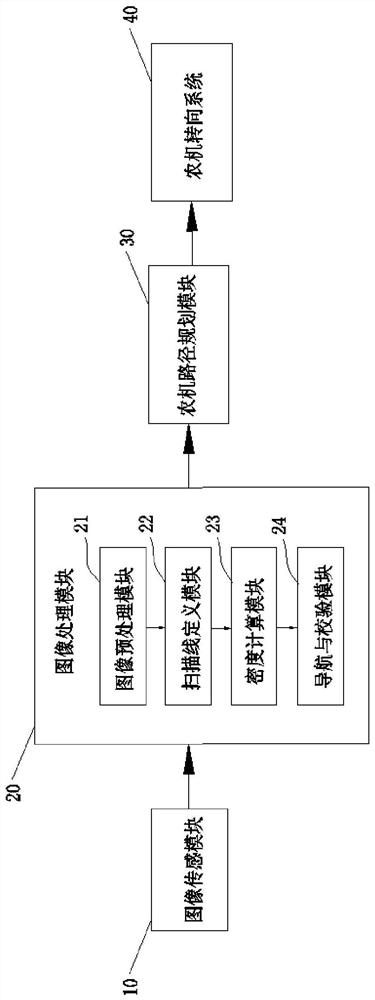
[0024] Such as Figure 1-7 Shown, a kind of intelligent agricultural machinery navigation system based on machine vision, a kind of intelligent agricultural machinery navigation system based on machine vision, comprises: image sensing module 10, obtains the farmland image on the navigation route; Image processing module 20, carries out farmland image Preprocessing, extracting the seedling line and the navigation line from the farmland image, and calculating the lateral deviation value and the heading angle deviation value of the agricultural machine and the navigation line, and performing a reliability judgment on the calculation result; the agricultural machine path planning module 30, according to the navigation line Perform field operation path planning; and the agricultural machine steering system 40, calculate the correct steering wheel angle of the agricultu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More