

Multivariable second-order nonsingular terminal sliding mode current control method provided with reaching law
A non-singular terminal, current control technology, applied in current controller, vector control system, motor generator control and other directions, can solve the problem of single variable sliding mode deviation from sliding mode surface and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
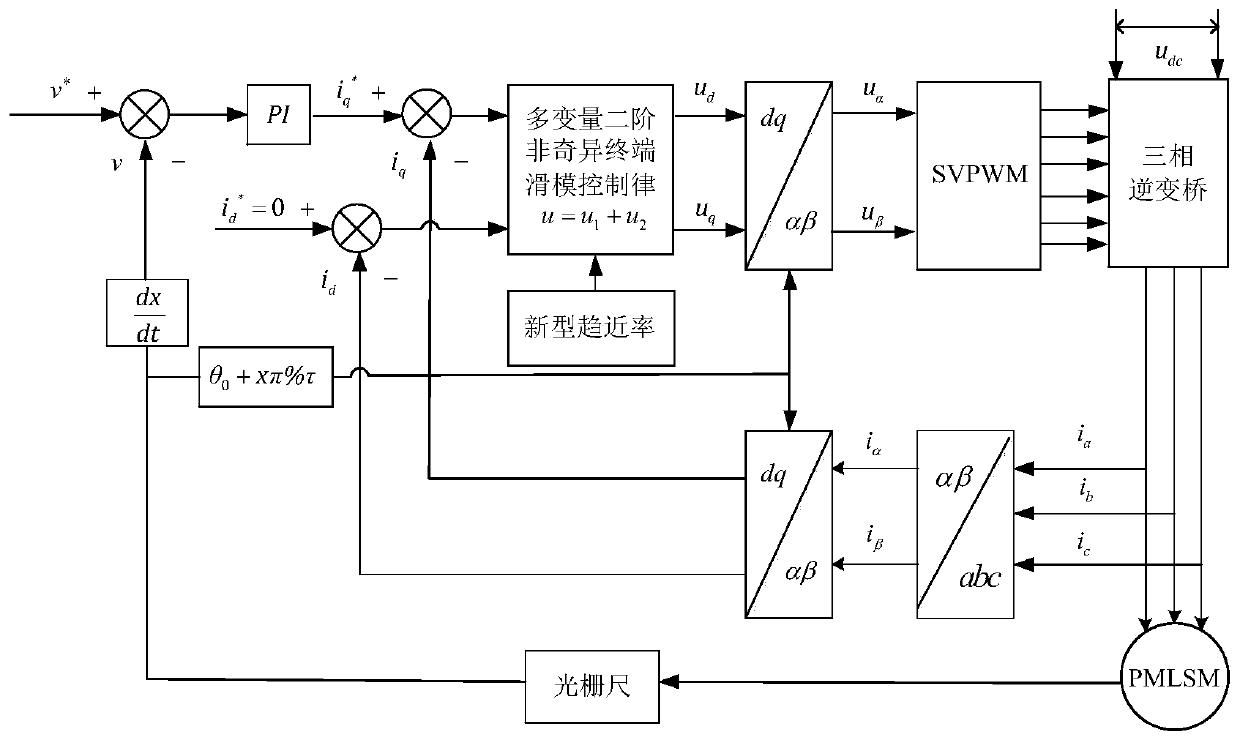
[0069] The control frame of a multi-variable second-order terminal sliding mode current control method that introduces reaching law in the present invention is as follows figure 1 As shown, the permanent magnet synchronous linear motor multivariable second-order non-singular terminal sliding mode current control system based on the reaching law of variable terminal attraction includes two parts: the speed loop and the current loop. Three-phase current i a i b i c After being measured by the current sensor, the stator current component i of the α-axis and β-axis in the two-phase stationary coordinate system is obtained by Clarke transformation α i β , i α i β After Park transformation, the stator quadrature axis and direct axis current components i in the two-phase rotating coordinate system are obtained d i q . The mover speed V is m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More