

Synchronous localization and mapping method for vision-inertia-laser fusion
An inertial and visual technology, used in image enhancement, image analysis, and re-radiation, etc., can solve the problems of easy loss and low SLAM accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be further described below in conjunction with the accompanying drawings.
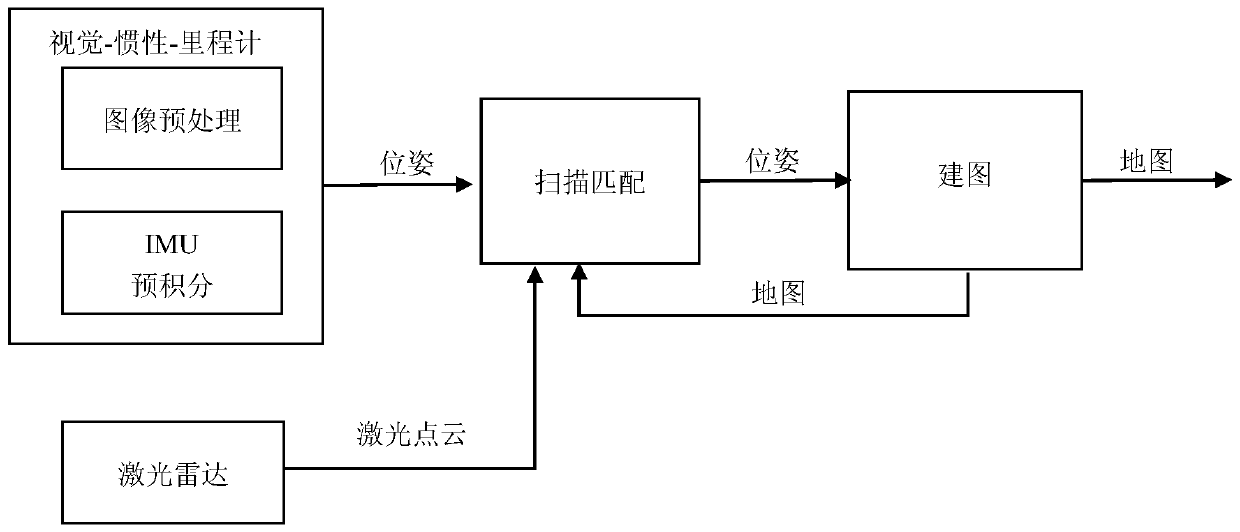
[0062] refer to Figure 1 to Figure 5 , a simultaneous positioning and mapping method for visual-inertial-laser fusion, comprising the following steps:
[0063] 1) Visual-inertial-laser odometer, the process is as follows:
[0064] Assuming that the internal parameters of the camera and the external parameters between the three sensors are known, and the sensors are time-synchronized, the camera and the lidar have the same frequency; this method involves four coordinate systems, namely the world coordinate system W, the camera coordinate System C, inertial measurement unit (IMU) coordinate system I and lidar coordinate system L; sensor coordinate system C, I, L changes with the movement of the device, C i expressed in t i The camera coordinate system at the moment; define the lidar coordinate system after initialization as the world coordinate system;
[0065] Firs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More