

Target tracking based unmanned aerial vehicle obstacle avoidance method and device, and unmanned aerial vehicle
A technology of target tracking and UAV, which is applied in the field of UAV obstacle avoidance based on target tracking and autonomous UAV obstacle avoidance. Path planning and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
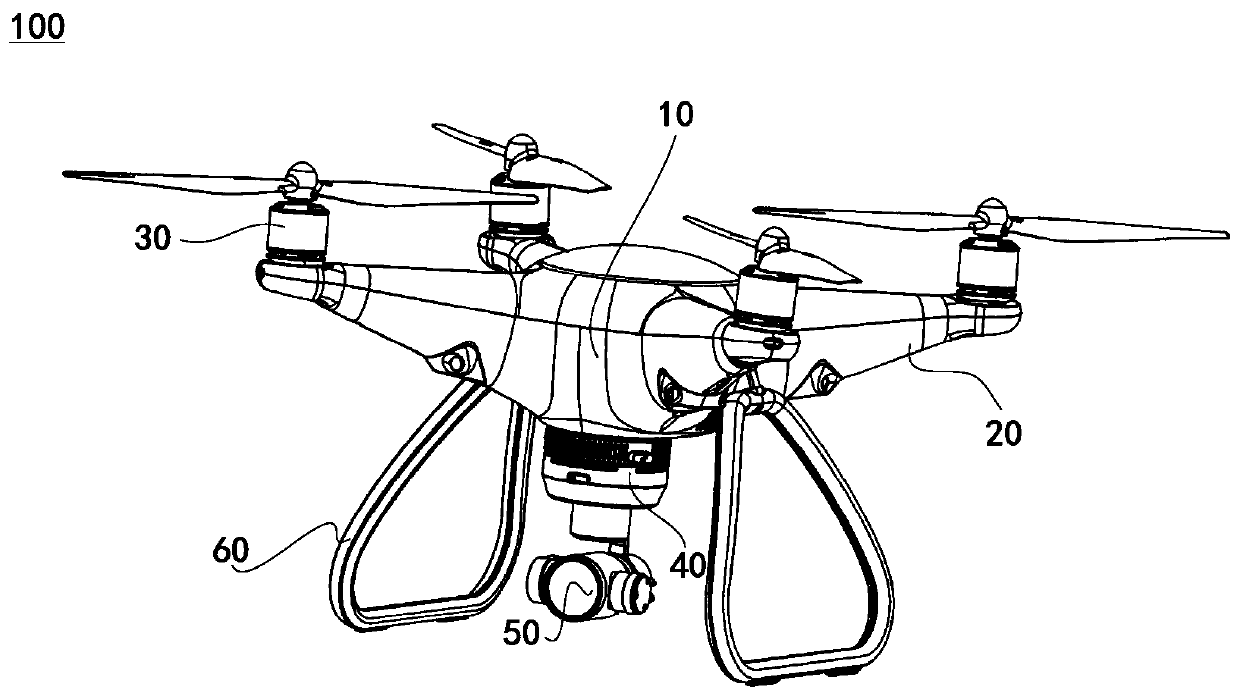
[0161] see figure 1 , is an unmanned aerial vehicle 100 provided by one of the embodiments of the present invention. The unmanned aerial vehicle 100 is a quadrotor unmanned aerial vehicle, including: a fuselage 10, an arm 20, a power unit 30, a platform 40, and a shooting device 50 , a depth sensor (not shown), a first gyroscope (not shown), a second gyroscope (not shown), a landing gear 60, a smart battery (not shown) and a flight control system (not shown). The machine arm 20, the cloud platform 40, the depth sensor and the landing gear 60 are all connected to the fuselage 10, the power unit 30 is arranged on the machine arm 20, the photographing device 50 and the first gyroscope are installed on the cloud platform 40, the second gyroscope, The intelligent battery and the flight control system are arranged in the fuselage 10 . Among them, the power unit 30, the gimbal 40, the photographing device 50, the depth sensor, the first gyroscope, the second gyroscope and the landin...
Embodiment 2
[0242] see Figure 4 , is a schematic flow chart of a target tracking-based UAV obstacle avoidance method provided by one embodiment of the present invention, which is applied to a UAV, the UAV is the UAV 100 described in the above embodiment, and The method provided by the embodiment of the present invention is executed by the above-mentioned flight control system, and is used for path planning for the entire flight space of the UAV, and improves the accuracy of autonomous obstacle avoidance in the target tracking process. The UAV obstacle avoidance based on target tracking Methods include:
[0243] S100: Determine the expected forward speed of the drone.
[0244] The above "expected forward speed" is used to keep the initial horizontal distance between the drone and the target, that is, the drone can maintain the initial horizontal distance from the target when the forward speed of the drone is the expected forward speed. Wherein, the target is an object tracked during the...
Embodiment 3
[0304] The term "module" used below is a combination of software and / or hardware that can realize a predetermined function. Although the devices described in the following embodiments can be implemented in software, implementation in hardware, or a combination of software and hardware is also conceivable.
[0305] see Figure 5 , is an object tracking-based UAV obstacle avoidance device provided by one embodiment of the present invention, the device is applied to a UAV, the UAV is the UAV 100 described in the above embodiment, and The function of each module of the device provided by the embodiment of the invention is executed by the above-mentioned flight control system, which is used to plan the path of the entire flight space of the UAV and improve the accuracy of autonomous obstacle avoidance in the process of target tracking. Machine obstacle avoidance devices include:
[0306] The first determining module 200 is used to determine the expected forward speed of the UAV, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More