

PID control-based municipal pipe network dredging robot pose deviation correcting system and method
A municipal pipe network and robot technology, which is applied in the field of PID-based control of the position and orientation correction system of municipal pipe network dredging robots, can solve problems such as position offset, and achieve the effects of saving trouble, easy maintenance, and simple and practical hardware.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings.
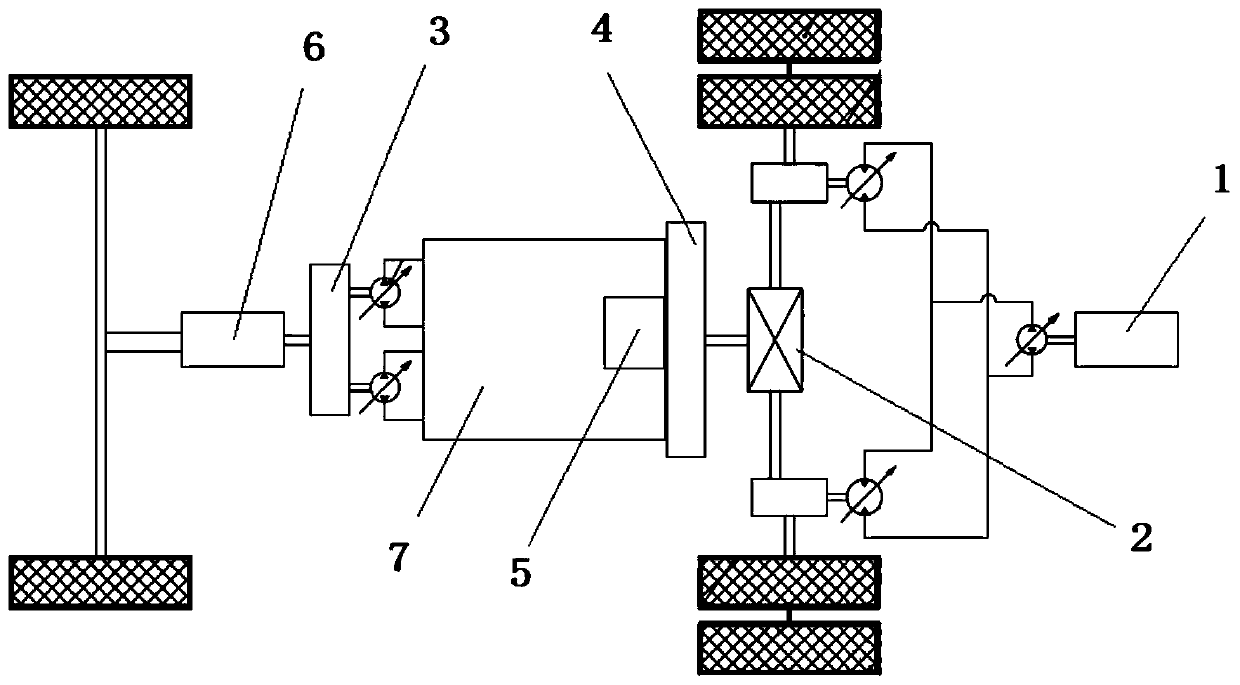
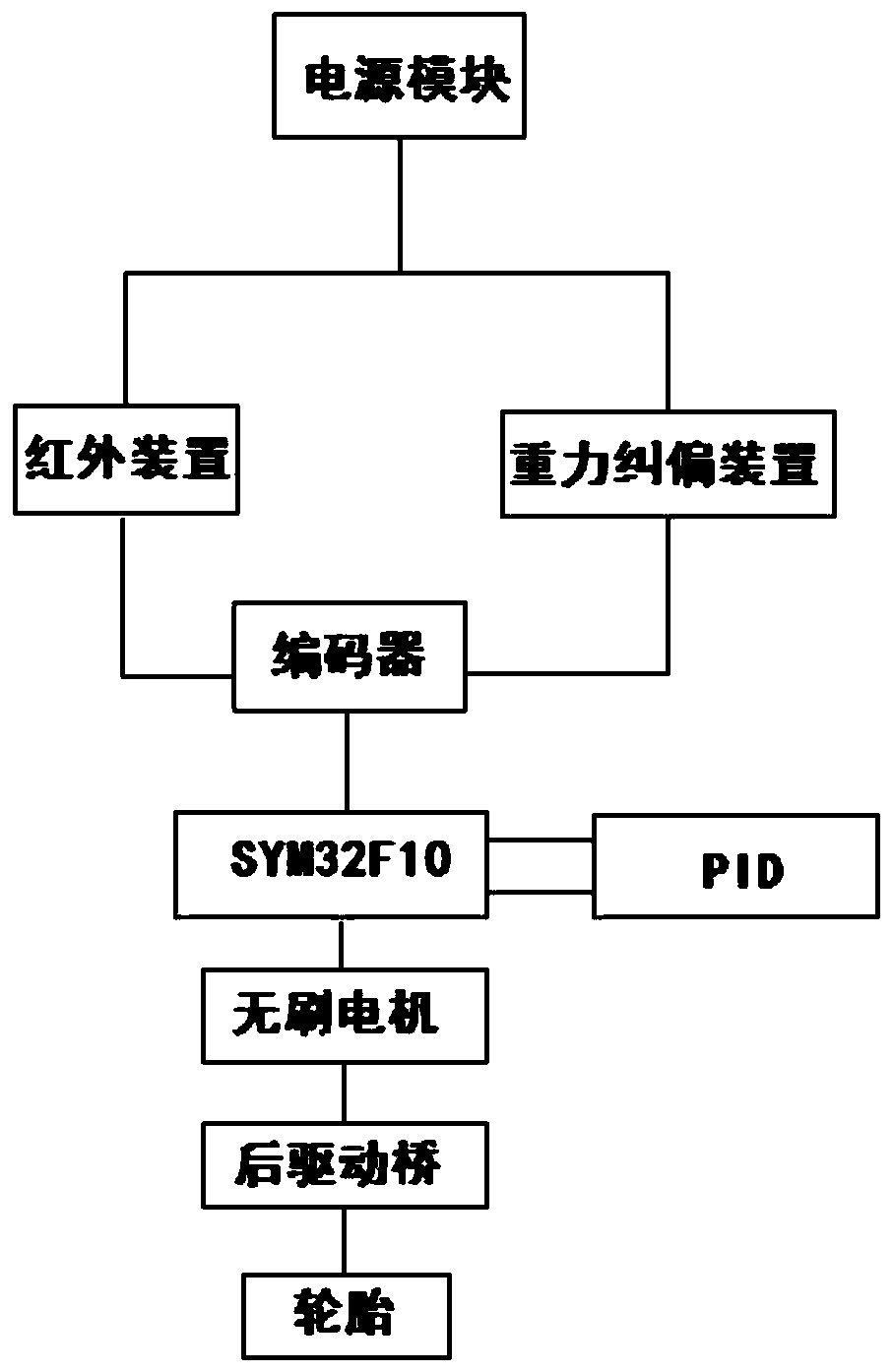
[0034] see figure 1 and figure 2 , a position and posture correction system based on PID control for municipal pipe network dredging robots, including a wheeled robot driven by a brushless motor 2. The wheeled robot is equipped with a gravity correction device 1, an encoder 3, a PID controller 4 and a control Unit 5, the gravity correction device 1 is connected to the encoder 3, the encoder 3 is connected to the control unit 5, the control unit 5 is connected to the PID controller 4 and the brushless motor 2, the wheeled robot is equipped with an infrared module 6, and the infrared module 6 is connected to the encoder 3. The infrared module 6 is arranged at the front of the wheeled robot, and the wheeled robot is provided with a power supply module 7 for power supply;
[0035] The gravity correction device 1 is used to monitor the deviation correction signal generat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More