

Vehicle cooperative navigation method based on relative motion model
A collaborative navigation and relative motion technology, applied in navigation, surveying and navigation, navigation through speed/acceleration measurement, etc., can solve problems such as difficulty in providing navigation information and unavailability of satellite navigation systems, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
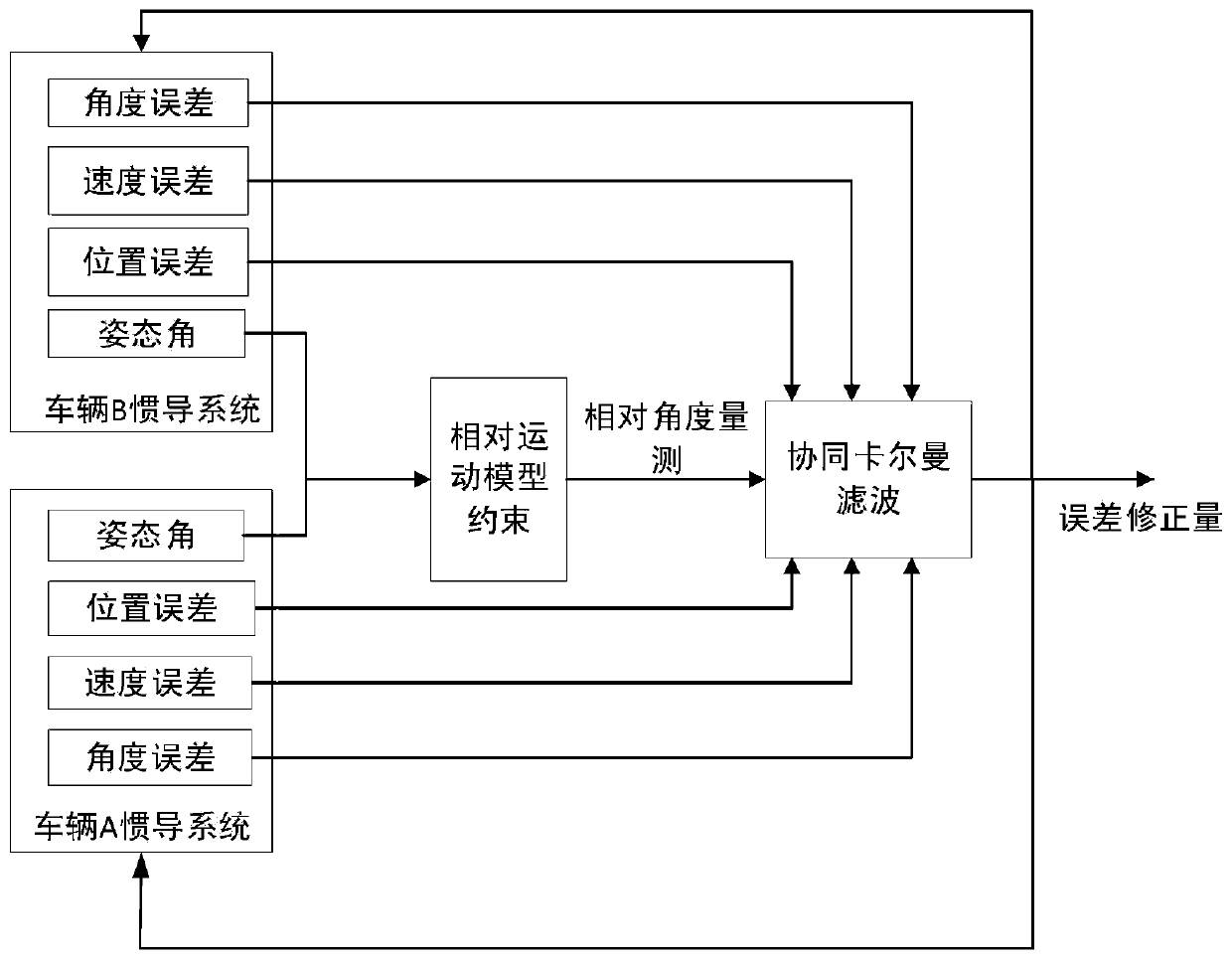
[0077] 1. Establish the state equation of the vehicle cooperative navigation method based on relative motion model constraints
[0078] First define the coordinate system: the geographic coordinate system selects "East-North-Sky" as the navigation system (n), and the carrier coordinate system (b) selects "Right-Front-Up". The state vector of the vehicle collaborative navigation system is:
[0079]
[0080] Among them, X is the state vector of the cooperative navigation system, X A is the state vector of vehicle A in the cooperative navigation system, X B is the state vector of vehicle B in the cooperative navigation system, is the platform error angle of the inertial navigation system of vehicle A, are the three-axis mathematical platform error angles of the strapdown inertial navigation system x, y, z of vehicle A respectively, δV A is the speed error of vehicle A, is the speed error of the three-axis northeast sky of vehicle A, δp A is the position error of vehic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More