Dual-use external limb robot for human motion assistance
A technology of human body movement and robotics, applied in the direction of devices that help people walk, devices that can be operated by the disabled, prostheses, etc., can solve the problems of single function, large mass and high cost, etc. Personal safety, the effect of preventing falls
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
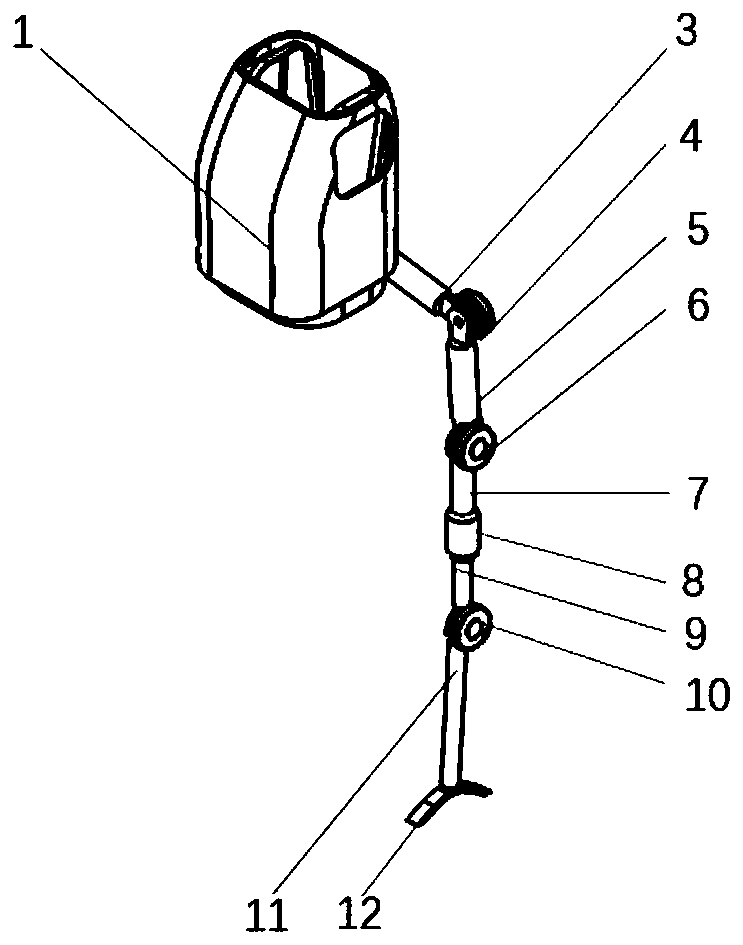
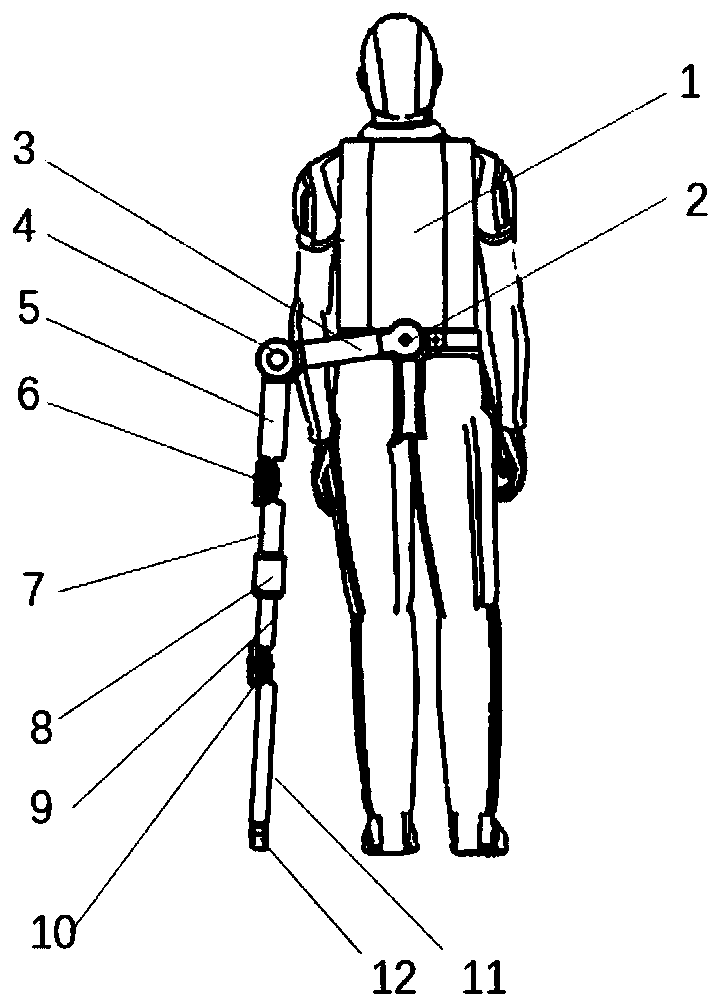
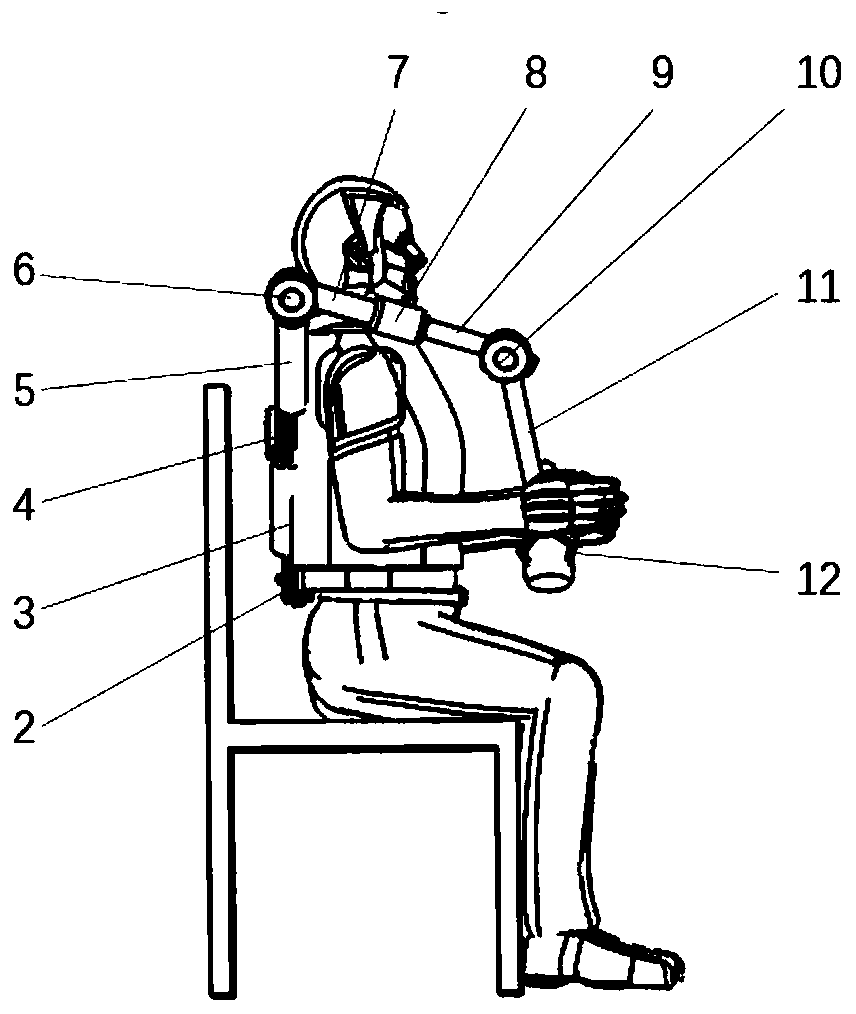
[0031] Such as figure 1 As shown, the present invention provides a dual-purpose exo-limb robot for human body motion assistance, including: a rigid wearable coat 1, a motion assisting module and end clamping claws 12; the rigid wearable coat is worn on the upper body of the human body, supporting The force is transmitted through the waist to support the user; the motion assisting module is used to assist walking when the human body is standing, and is also used to assist in completing the grasping action when the human body is in a sitting position; the end clamping claw 12 is used to assist walkin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com