

Serial and parallel mixed connection arm/leg mechanism for prosthetic robot fore limb mechanical system
A bionic robot and mechanical system technology, applied in the field of serial-parallel hybrid arm/leg mechanism, can solve problems such as limited ability to cross obstacles, difficult walking and obstacle-crossing operations, and small working space for one leg, so as to improve joint flexibility The effect of improving the stability, improving the rotation accuracy and improving the stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further explained below in conjunction with the drawings:
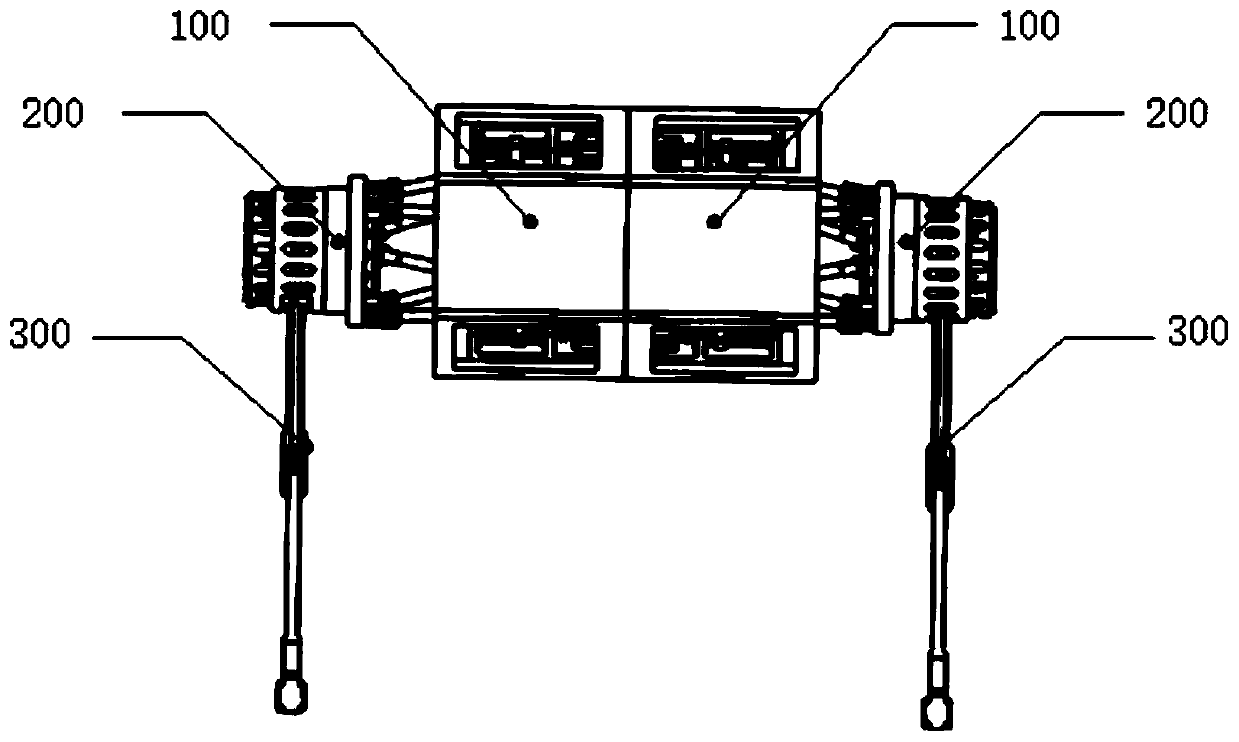
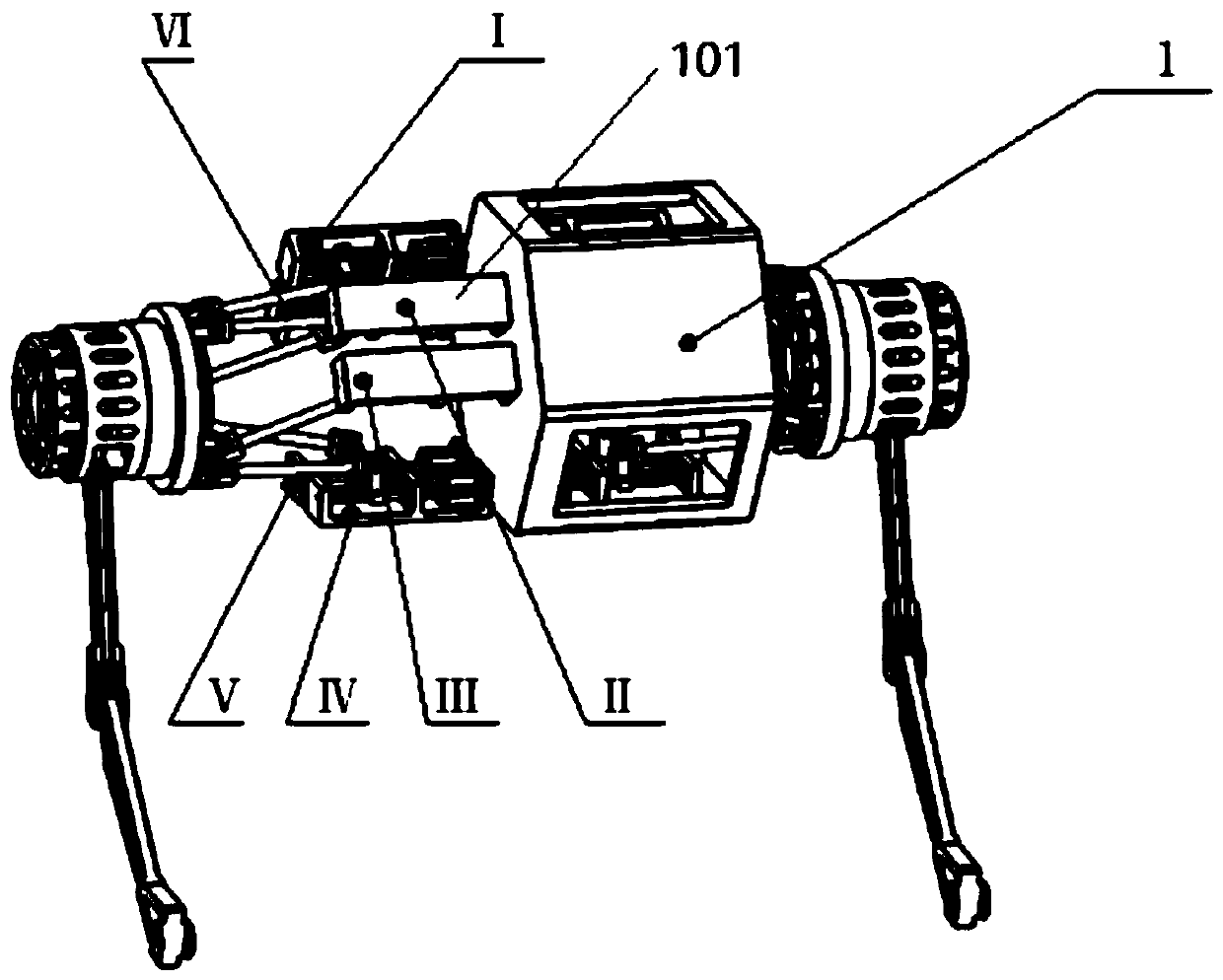
[0026] See Figure 1 to Figure 5 , A serial-parallel hybrid arm / leg mechanism for the forelimb mechanical system of a bionic robot, including a body 100, a hip joint 200 and an outrigger 300; two bodies 100 are fixedly connected side by side to form a body body, and both ends of the body body are respectively arranged There are hip joints 200, and legs 300 are connected below each hip joint 200;
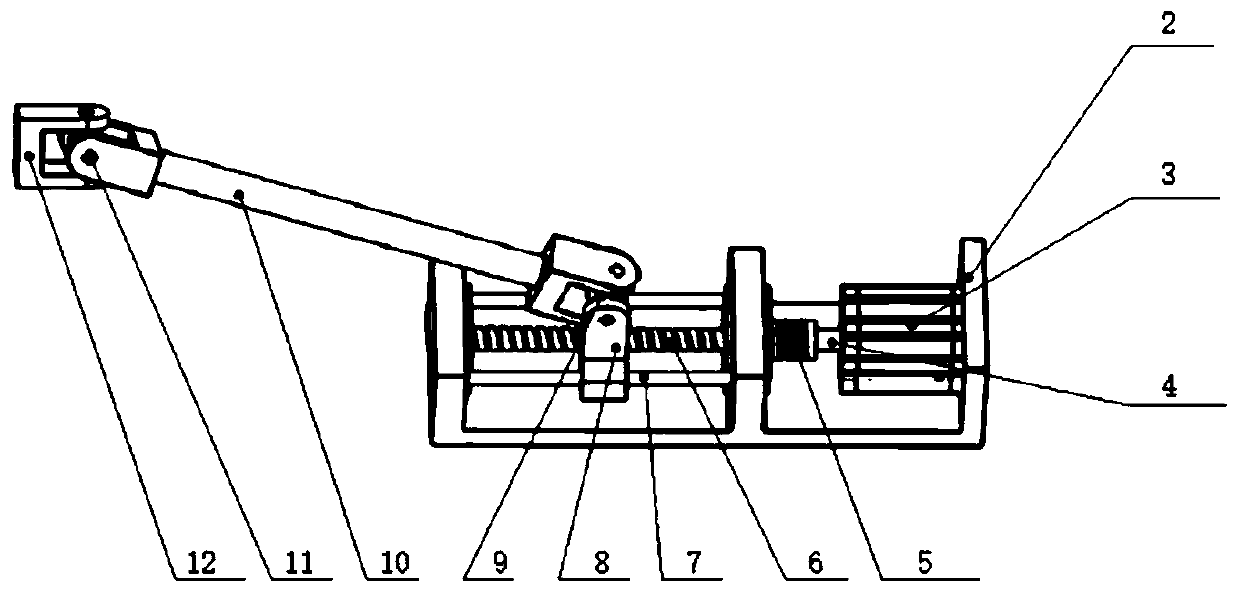
[0027] The body 100 includes a body frame 1 and a motion branch chain 101; every two motion branches 101 form a branch chain group, and several branch chain groups are vertically fixed on the inner wall of the body frame 1; the motion branch chains 101 are used for hip joints All directions of translation, pitch or yaw movement;
[0028] The hip joint 200 includes a housing, a drive motor, an encoder connecting shaft 18, a thigh planet carrier 26, a thigh reducer 28, a lower leg planet carrier...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More