

Unmanned vehicle urban intersection left turn decision-making method based on conflict resolution
A technology of unmanned vehicles and decision-making methods, which is applied in the field of left-turn decision-making at urban intersections of unmanned vehicles, and can solve problems such as poor adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
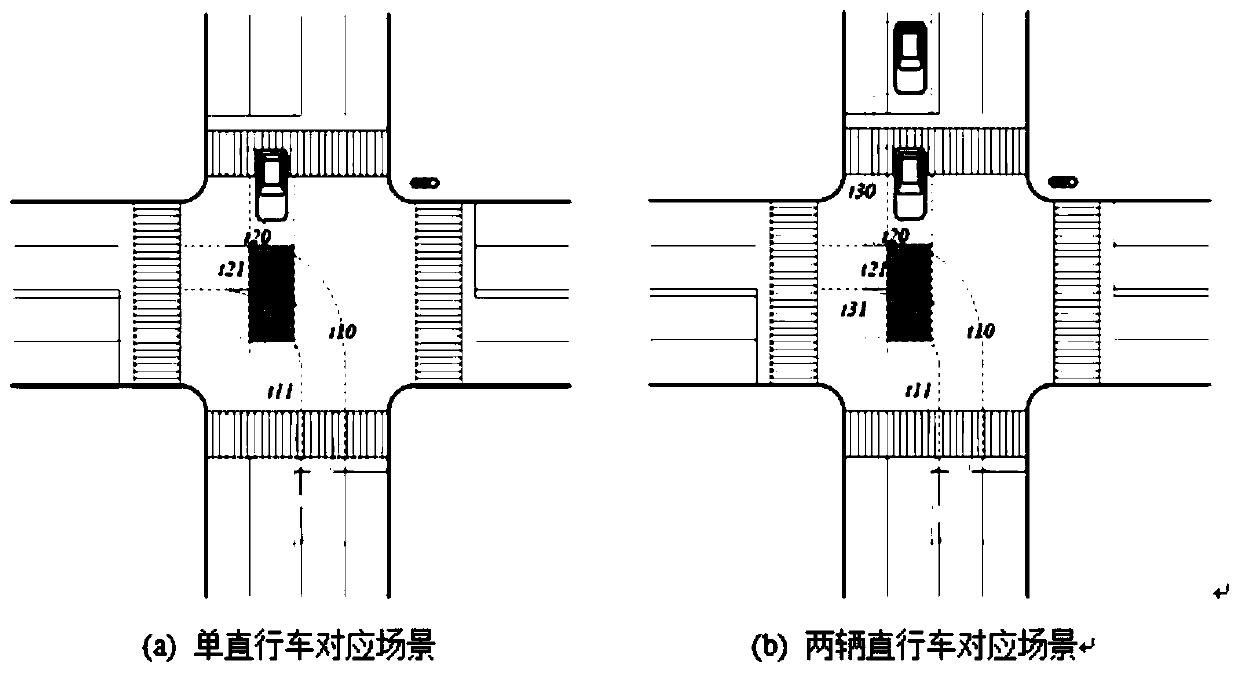
[0107] The invention mainly aims at the conflict problem between the unmanned vehicle and the opposite straight vehicle when the unmanned vehicle turns left at an urban intersection, and proposes a decision-making modeling method for the unmanned vehicle. A detailed description of the present invention is as follows.
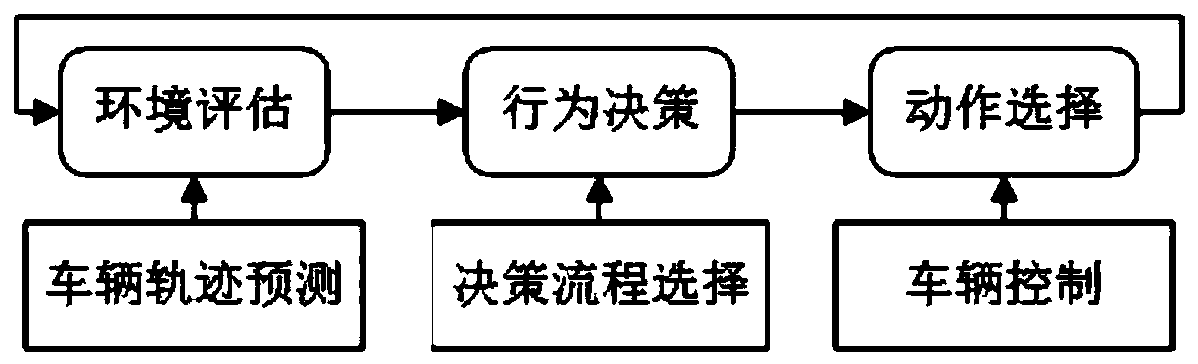
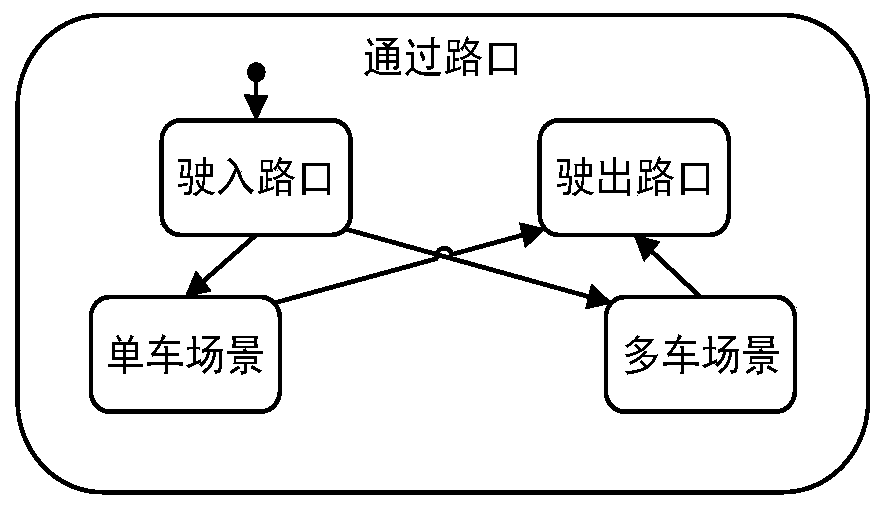
[0108] like figure 1 As shown, the present invention proposes a decision-making framework based on environmental assessment-behavioral decision-action selection for the driving behavior of unmanned vehicles turning left through intersections, wherein the environmental assessment module corresponds to the trajectory prediction of vehicles going straight at the intersection; the behavior decision-making module Corresponding to the selection of decision-making processes in different scenarios; the action selection module corresponds to the selection of vehicle control parameters.
[0109] (1) Aiming at the trajectory prediction problem of vehicles going straight a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More