

Unmanned aerial vehicle (UAV) GPS spoofing detection method
A technology of deception detection and UAV, which is applied in the direction of radio wave measurement system, measurement device, satellite radio beacon positioning system, etc. It can solve the problems of powerlessness, the inability of UAV to calculate the flight status, and low computational complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
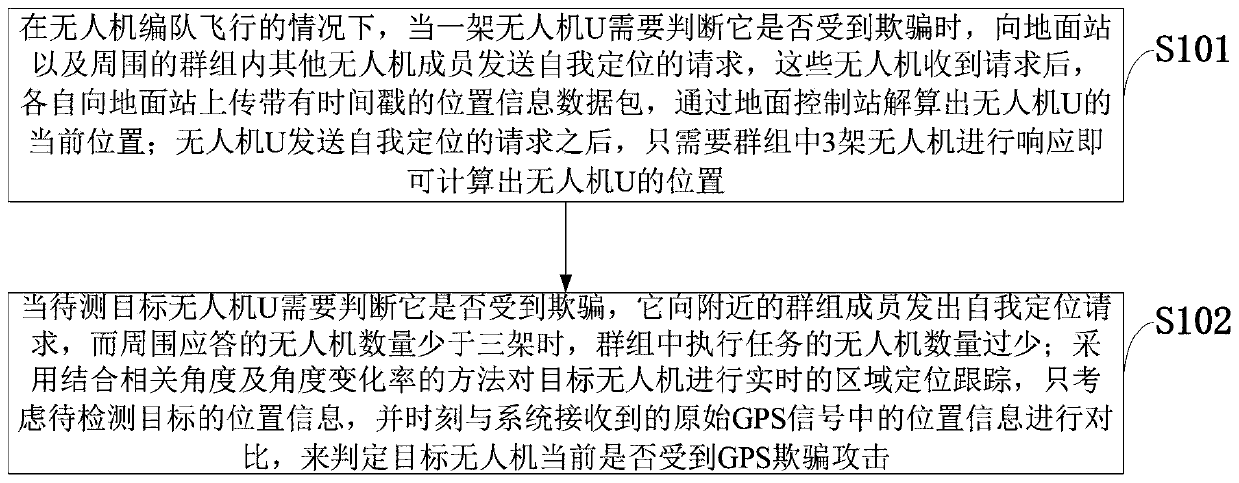
[0071] Aiming at the specific situation and requirements of the UAV system, the present invention proposes an active GPS spoofing detection method based on time difference. In the case of adding auxiliary equipment as little as possible, through the communication link from the UAV and the unmanned Extract relevant data from the inherent inertial navigation device of the aircraft, actively calculate the position information of the drone in real time, and compare it with the positioning information received by the GPS receiver, and perceive whether the group members are at the first time when the system is attacked by GPS spoo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More