

Tree climbing robot for pruning
A technology of robots and tree trunks, applied in the field of tree branching, can solve problems such as potential safety hazards, environmental damage, and large space requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
[0065] The present embodiment is an embodiment of a tree-climbing robot for debranching.
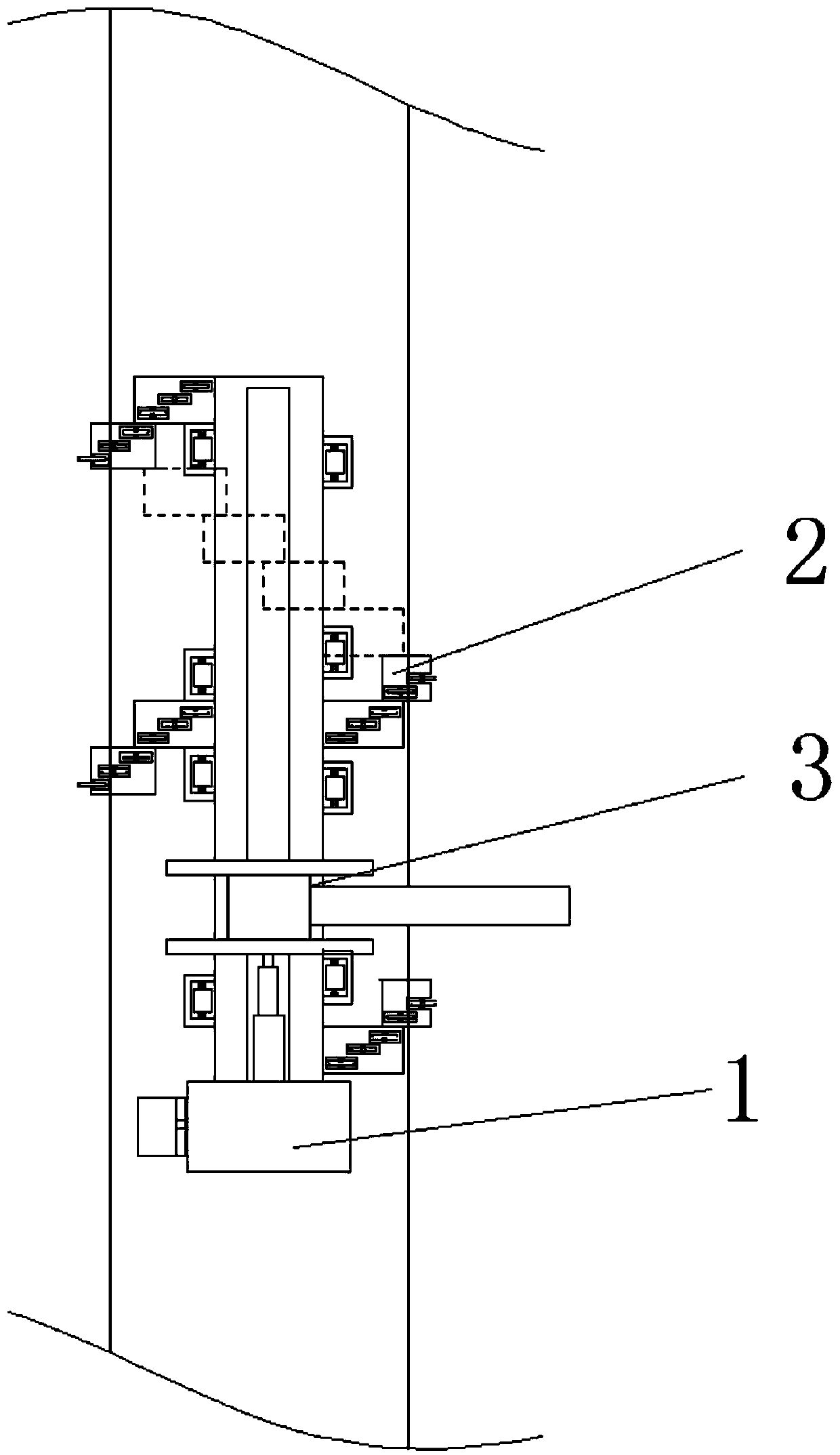
[0066] Such as figure 1 As shown, a tree-climbing robot for delimbing disclosed in this embodiment includes a power component 1, a crawling device 2 and a deforestation component 3; , the branching member 3 is arranged on the power member 1;
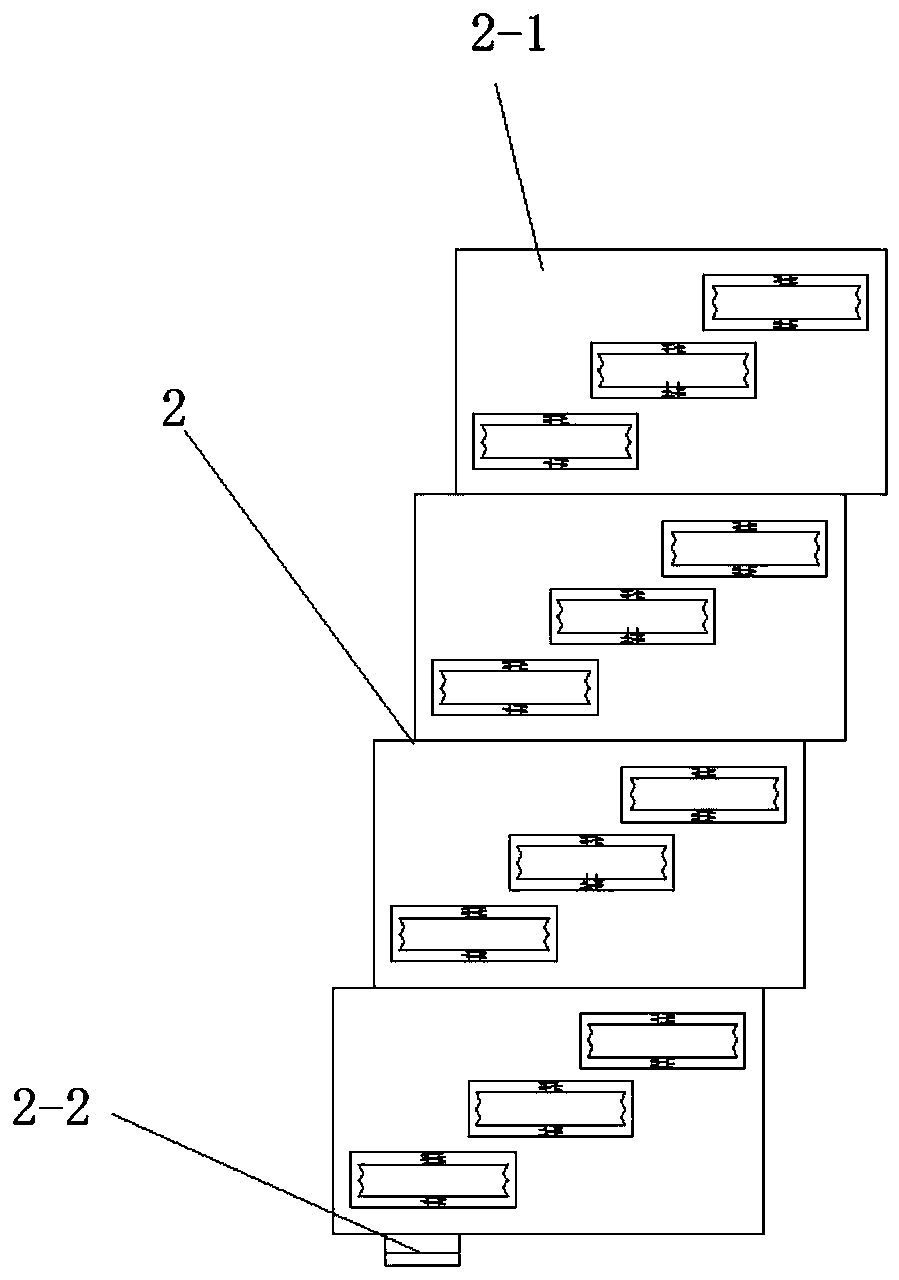
[0067] The crawling device 2 is movably connected with the power component 1. When the crawling device 2 is not installed, the overall shape is "parallelogram". From "parallelogram" to "serpentine", the "serpentine" crawling device 2 can fix the power component 1 on the trunk through its own shrinkage deformation, and the power component 1 can make the crawler 2 spiral up and down, In the process of spiral lifting, the power member 1 fully cooperates with the change of the outer diameter of the tree through the contraction and deformation of the crawler device 2, so as to keep the power member 1 stable. Can be deformed successively to pass throu...
specific Embodiment approach 2
[0071] This embodiment is an embodiment of a power component for a delimbing robot. It should be noted that the power component for a tree-climbing robot in this embodiment can be implemented separately, that is, it can exist alone as a part of a tree-climbing robot for tree-breaking, or it can be used for a tree-climbing robot described in Embodiment 1. Pruning was further defined with a tree-climbing robot.
[0072] combine figure 1 , 2 , 5, and 6, a power member for a branching robot disclosed in this embodiment includes a power box 1-1, a vertical beam 1-2, an inclined roller 1-5, a transmission T-shaped gear 1-6, Motor 1-7, driving T-shaped gear 1-8 and connecting T-shaped gear 1-9; the power box 1-1 and the connecting plate are connected by parallel symmetrical vertical beams 1-2, and the power box 1- There are two transmission chambers 1-3 symmetrically opened in 1, two grooves are symmetrically opened on the side wall of the vertical beam 1-2, and a chute 1-4 is ope...
specific Embodiment approach 3
[0079] This embodiment is an embodiment of a delimbing component for a delimbing robot. It should be noted that the branching member for a branching robot of this embodiment can be implemented separately, that is, it can exist alone as a part of a branching tree-climbing robot for branching, or it can be used for a tree-climbing robot described in the first embodiment. Species tree-climbing robot for delimbing is further defined.
[0080] Such as figure 1 , 5 , 6, a branching member for a branching robot disclosed in this embodiment is characterized in that it includes a splint 3-1, a cross-shaped limiting plate 3-2, a branching saw 3-3 and an air cylinder 3-4 The splint 3-1 is parallel and symmetrically arranged, and the side wall of the splint 3-1 is provided with a cross-shaped limiting plate 3-2, and the cross-shaped limiting plate 3-2 is movably arranged on the vertical beam 1-2. In the chute 1-4, the branching saw 3-3 is arranged between two parallel splints 3-1, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More