

Modular joint for lower limb rehabilitation training exoskeleton
A modular joint and rehabilitation training technology, applied in the direction of equipment to help people move, physical therapy, etc., can solve problems such as poor adaptability and safety, large differences in rehabilitation effects, inaccurate movement control, etc., to achieve stability and training. Good effect, flexible and convenient length adjustment, good safety and adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
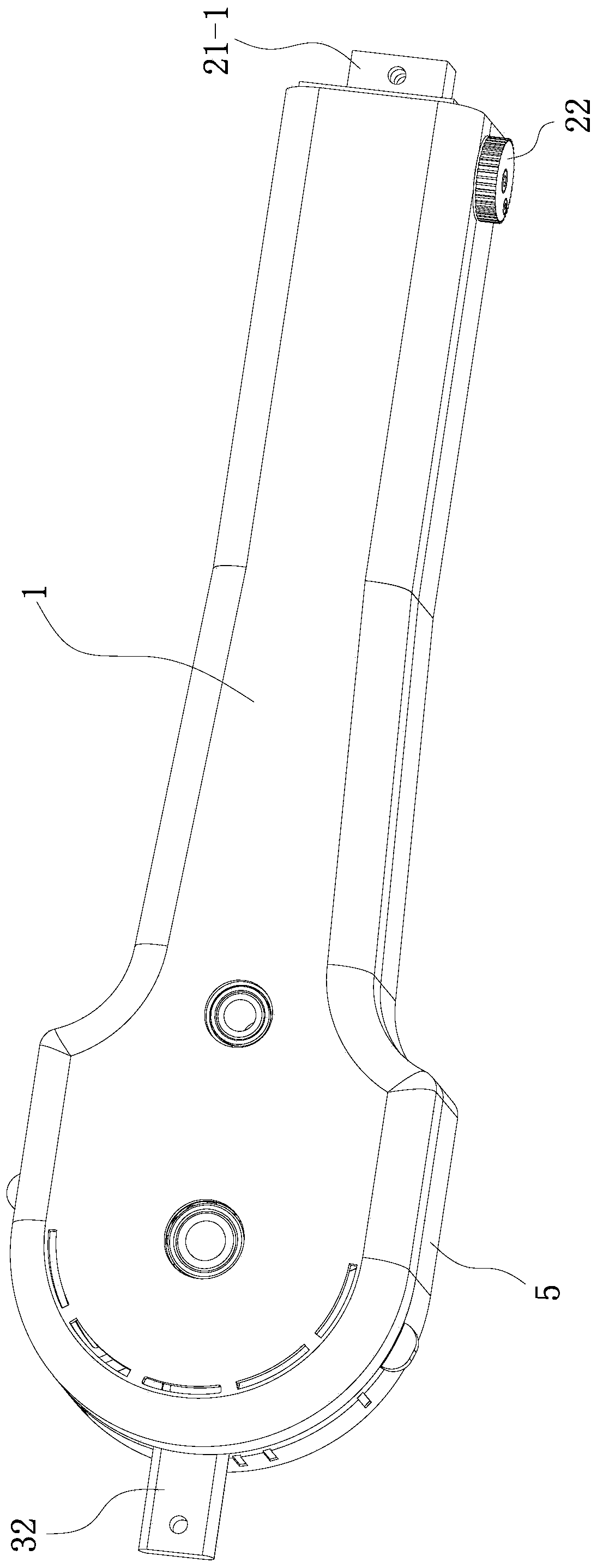
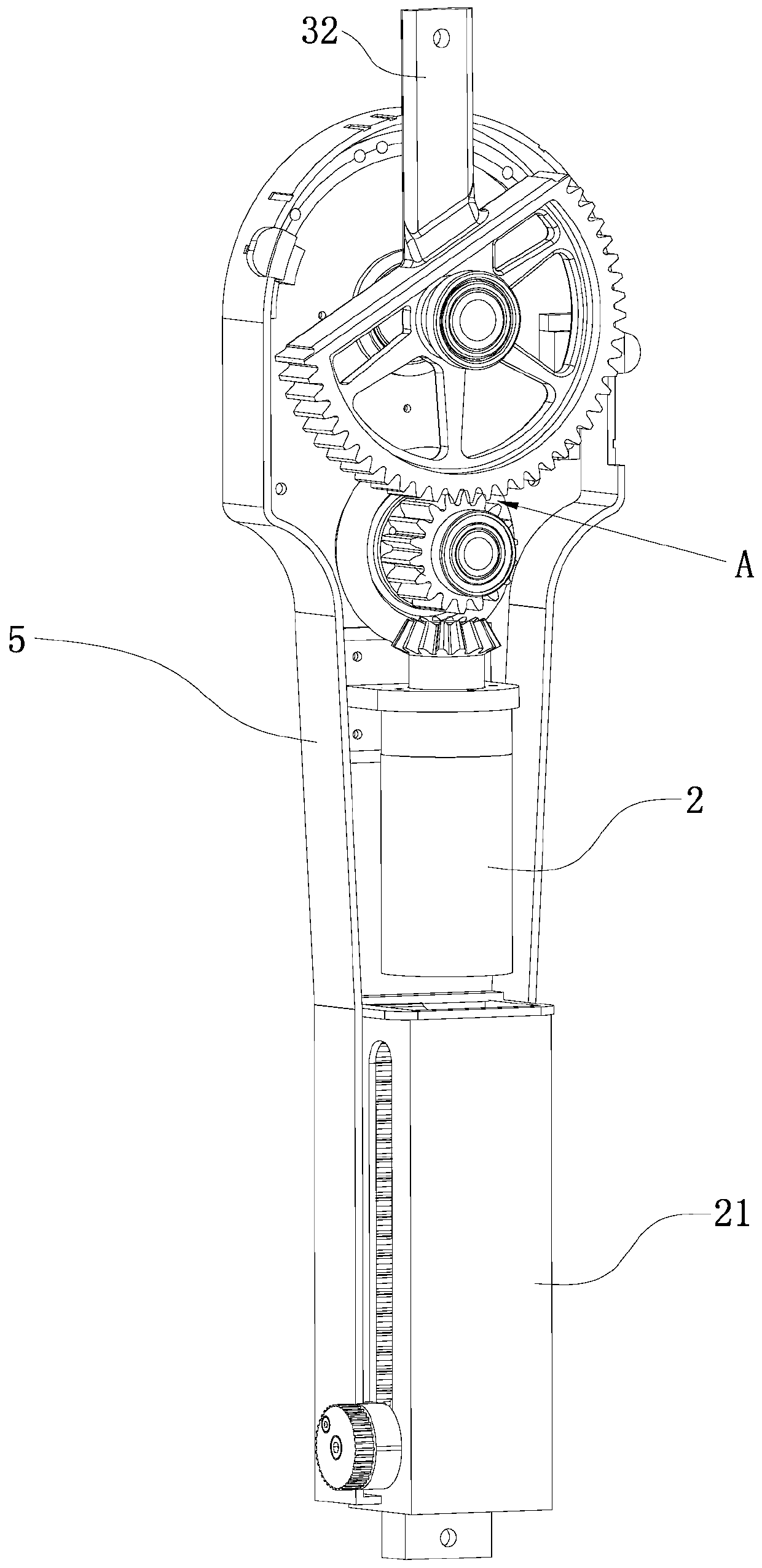
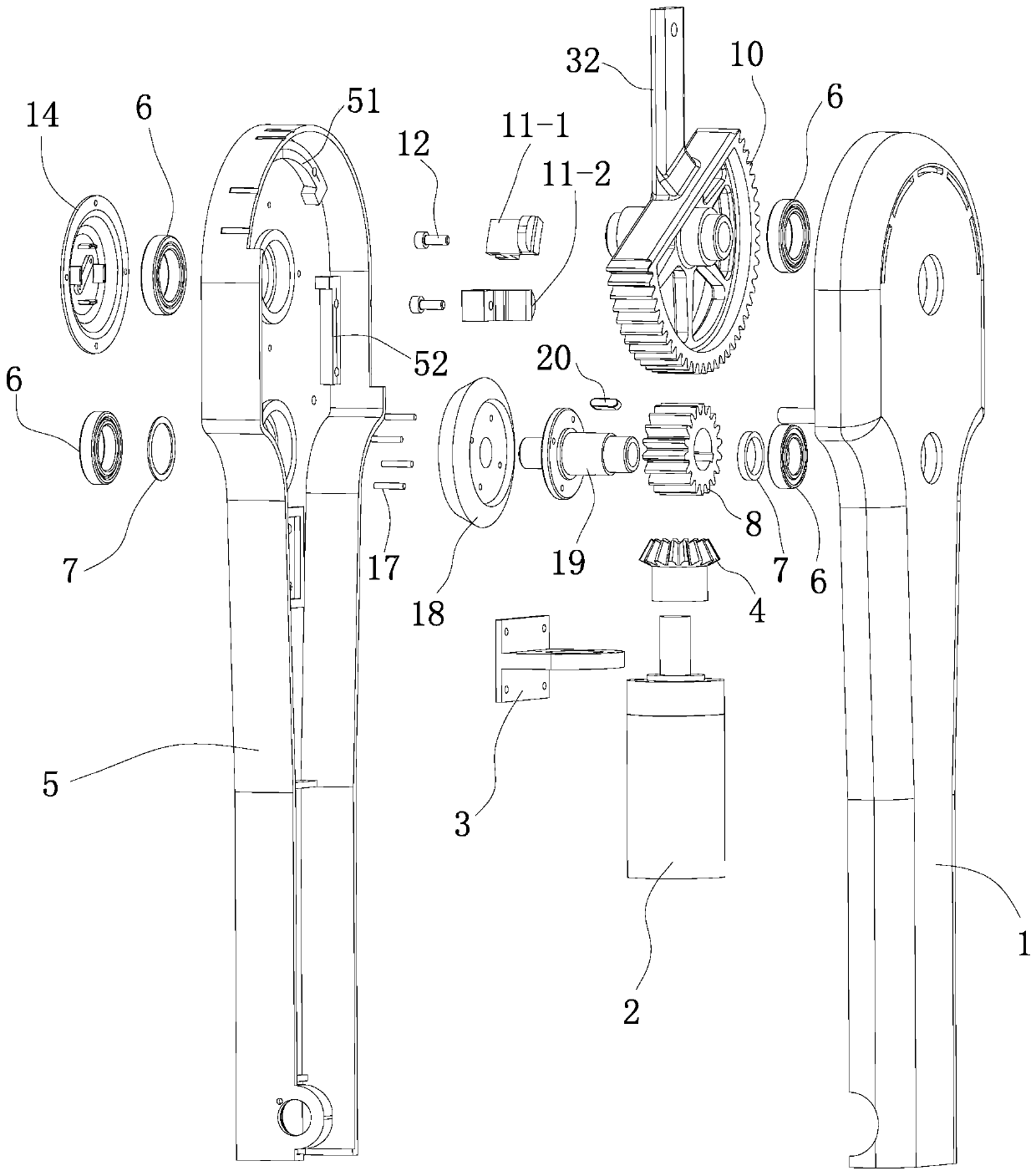
[0026] See figure 1 , figure 2 with Figure 4 As shown, a modular joint for exoskeleton for lower limb rehabilitation training, which includes a transmission and limit mechanism;
[0027] The transmission and limit mechanism includes a cover plate 1, a drive motor 2, a bracket 3, a bottom plate 5, a transmission assembly A and an output connecting rod 21; the cover plate 1 and the bottom plate 5 are buckled and connected together, and the cover plate 1 and the bottom plate 5 are A drive motor 2, a bracket 3, a transmission assembly A, and an output link 32 are arranged in the middle; the drive motor 2 is installed on the bracket 3, and the bracket 3 is installed on the bottom plate 5. The drive motor 2 drives the transmission assembly A, and one end of the output link 21 is connected to The transmission assembly A is connected, the other end of the output link 21 extends out of the cover plate 1 and the bottom plate 5, and the transmission assembly A drives the output link 21 to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More