Ramp low speed working condition driving control method for distributed drive off-road vehicles
An off-road vehicle and distributed technology, which is applied in the field of driving control of distributed driving off-road vehicles in low-speed conditions on slopes, can solve the problems of less attention to adaptability to down-slope speed conditions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0099] The present invention will be further described below in conjunction with specific examples and accompanying drawings.
[0100] The invention provides a driving control method of a distributed drive off-road vehicle on a ramp at low speed, which includes the following steps:
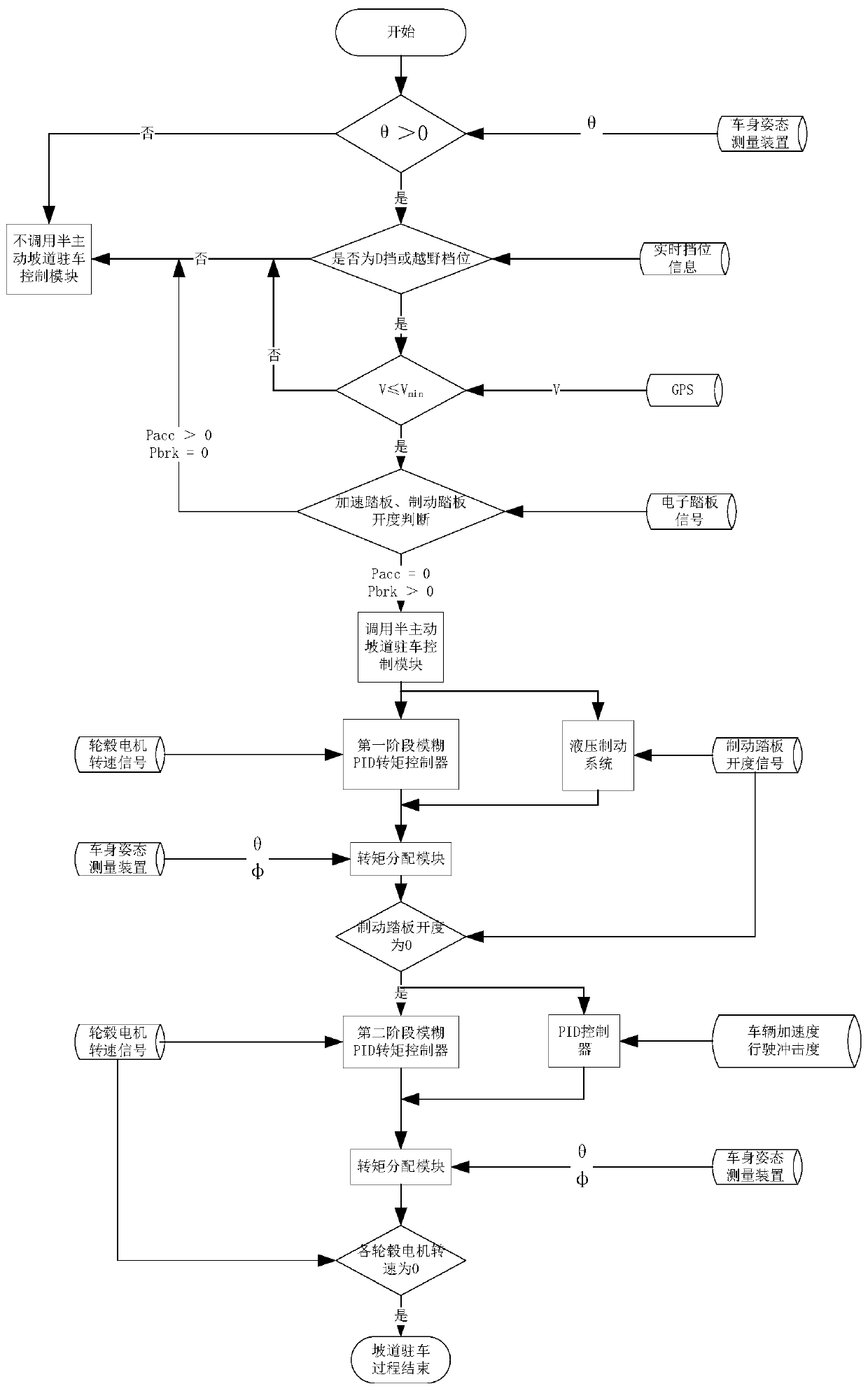
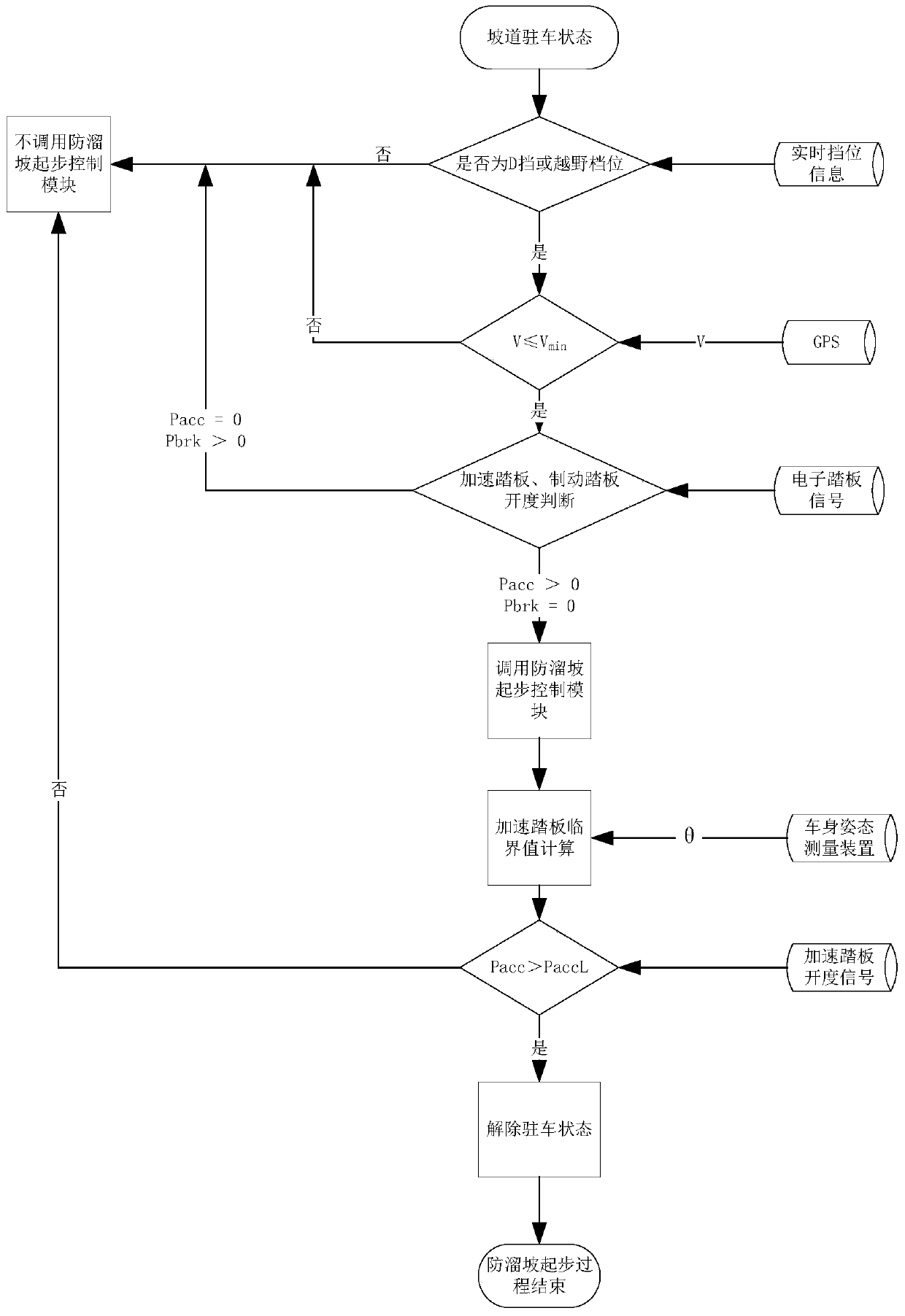
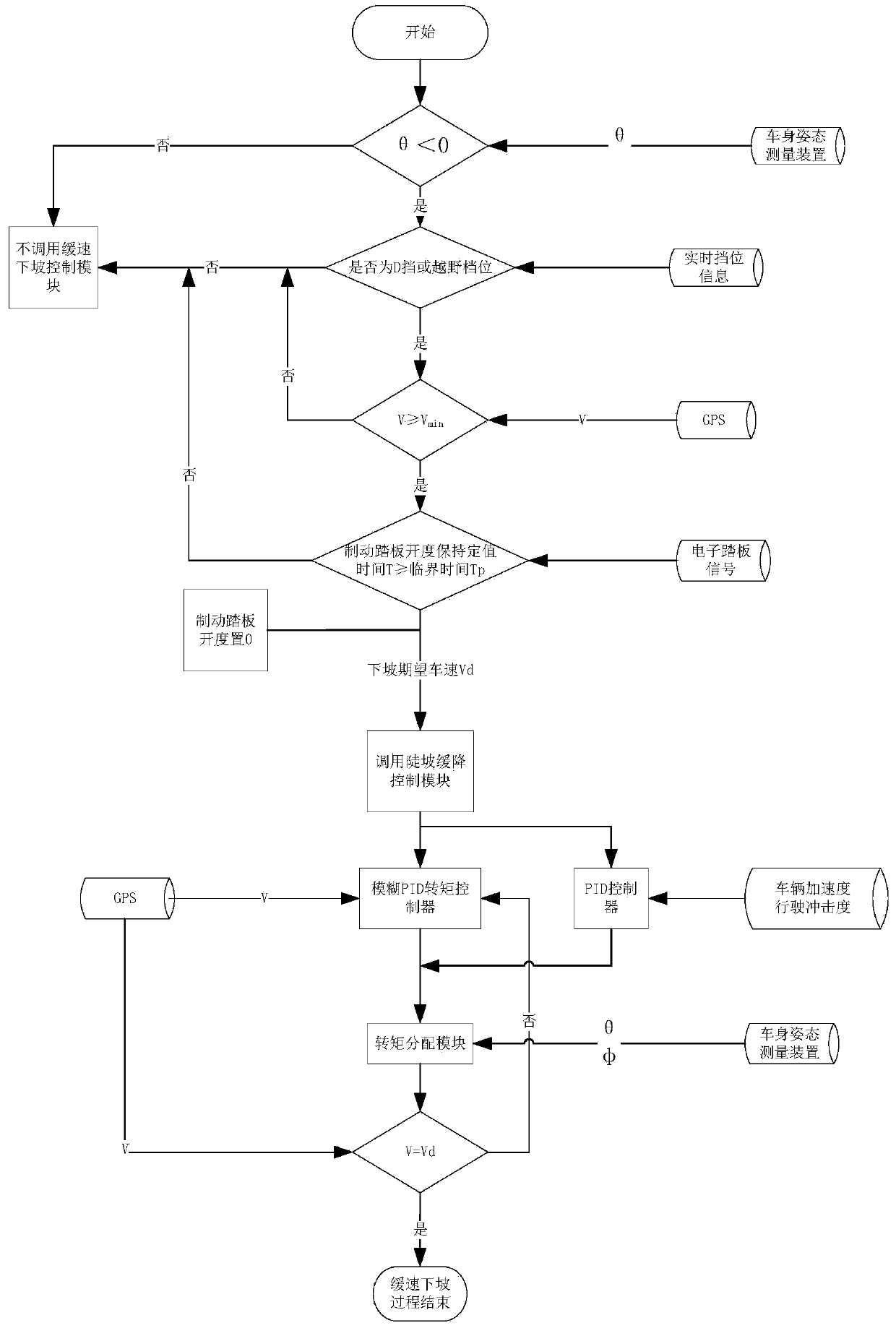
[0101] S1. Driver intention judgment: based on the real-time output signal of the body attitude kinematics measurement system, combined with the vehicle gear position signal, accelerator pedal opening signal, brake pedal opening signal, real-time vehicle speed signal and real-time rotation speed of each wheel, the The driver's driving intention is judged.
[0102] In the vehicle gear position signal, when the driver selects D gear or off-road gear to drive, the vehicle controller starts this method and makes the following judgments:
[0103] When the body posture measurement device detects that the current slope angle θ>0, if there is a real-time vehicle speed V≤V min , Electronic accelerator pe...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap