Hybrid ankle joint training robot
An ankle joint and robot technology, applied in the field of ankle joint training, can solve problems such as numerical evaluation of the rehabilitation status of difficult patients, lack of data monitoring and feedback, coupling and inconvenient control, etc., and achieve a safety factor of human intelligence, compact structure, and ease of use. The effect of making and installing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Exemplary embodiments, features, and aspects of the present invention will be described in detail below with reference to the accompanying drawings. The same reference numbers in the figures indicate functionally identical or similar elements. While various aspects of the embodiments are shown in drawings, the drawings are not necessarily drawn to scale unless specifically indicated.
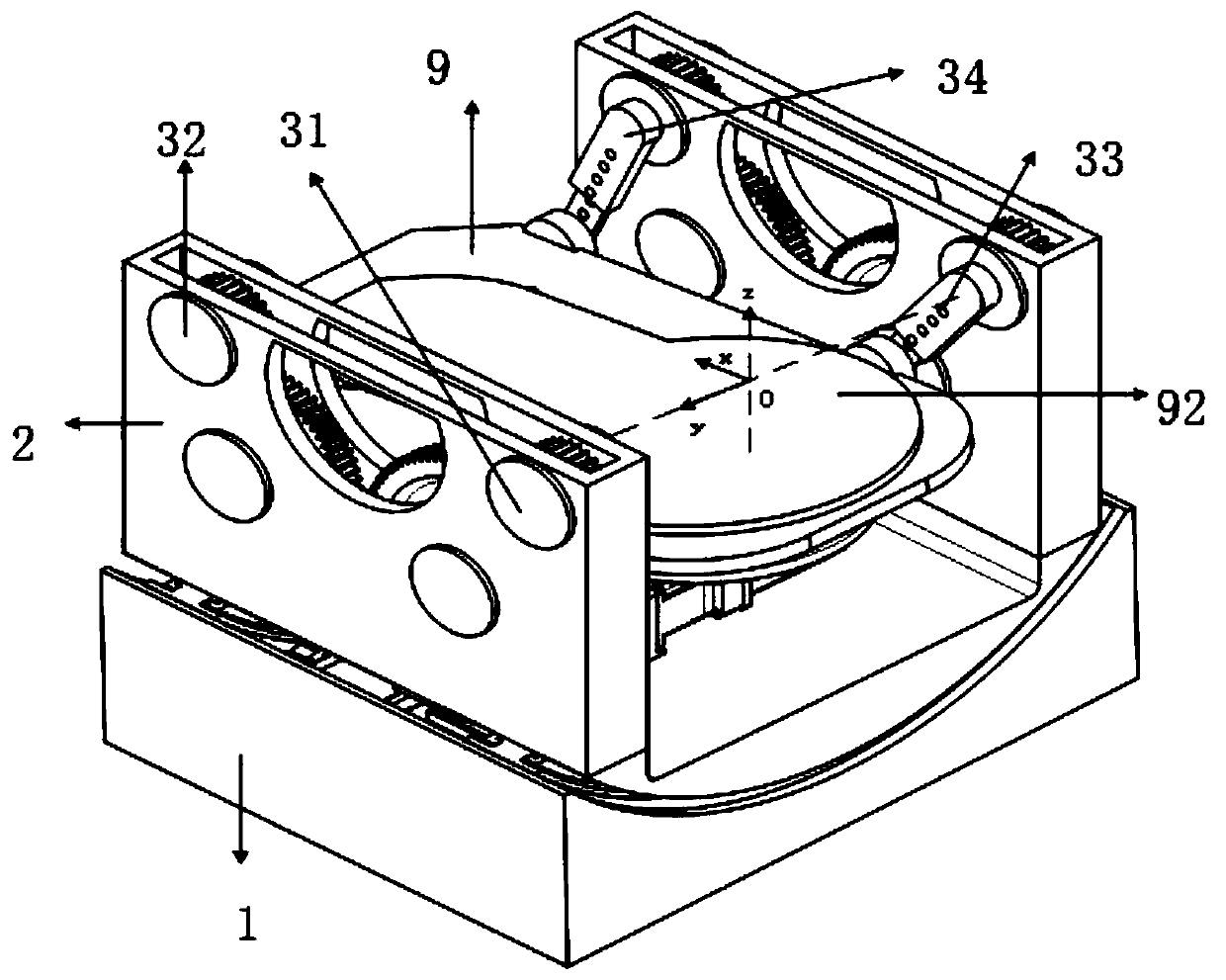
[0024] exist figure 1 The overall figure of the ankle joint training robot shown shows the components of the robot body, which includes a base 1, a support frame 2, a first branch 31, a second branch 32, a third branch 33, a Four branches 34, the moving platform 9 and the pedal 92, the first branch 31, the second branch 32, the third branch 33 and the fourth branch 34 connect the base 1 and the moving platform 9 together. The four branches are respectively connected with the moving platform 9 through a rotating bracket.
[0025]The base 1 and the support frame 2 are connected in series...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com