Robot simulating human arm intelligent system
A technology of robot arms and intelligent systems, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as complex control methods, and achieve the effect of simple control methods and high bionicity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
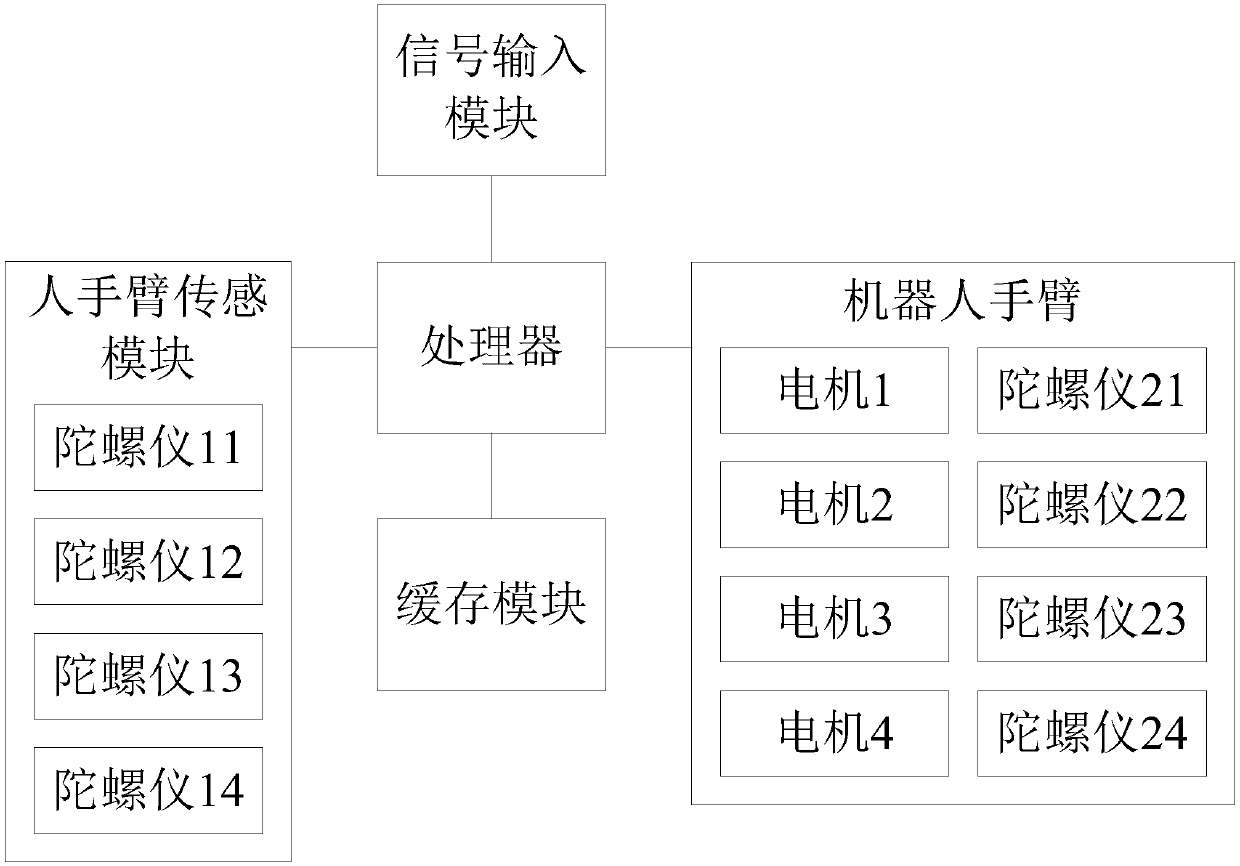
[0022] Such as figure 1 As shown, the intelligent system of robot simulating human arm of the present invention includes a bionic robot arm, and also includes a processor connected with the robot arm, and the processor is also connected with a human arm sensing module and a signal input module; the human arm The sensing module includes 4 gyroscopes. The robot arm includes a motor and a gyroscope matched with the gyroscope in the sensor module of the human arm. A cache module is also connected to the processor. When the system is working, the processor reads the data of gyroscope 11, gyroscope 12, gyroscope 13, and gyroscope 14 from the sensor module of the human arm, and stores the data of gyroscope 12, gyroscope 13, and gyroscope 14 into The cache module controls the motor 1 in the robot arm according to the data of the gyroscope 11. The gyroscope 21 is used to collect the action effect of the motor 1 and feed it back to the processor to complete the feedback control of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More