

Method for compensating positioning errors of robot based on deep neural network
A deep neural network, robot positioning technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of only considering geometric errors, complexity, and limited accuracy compensation effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
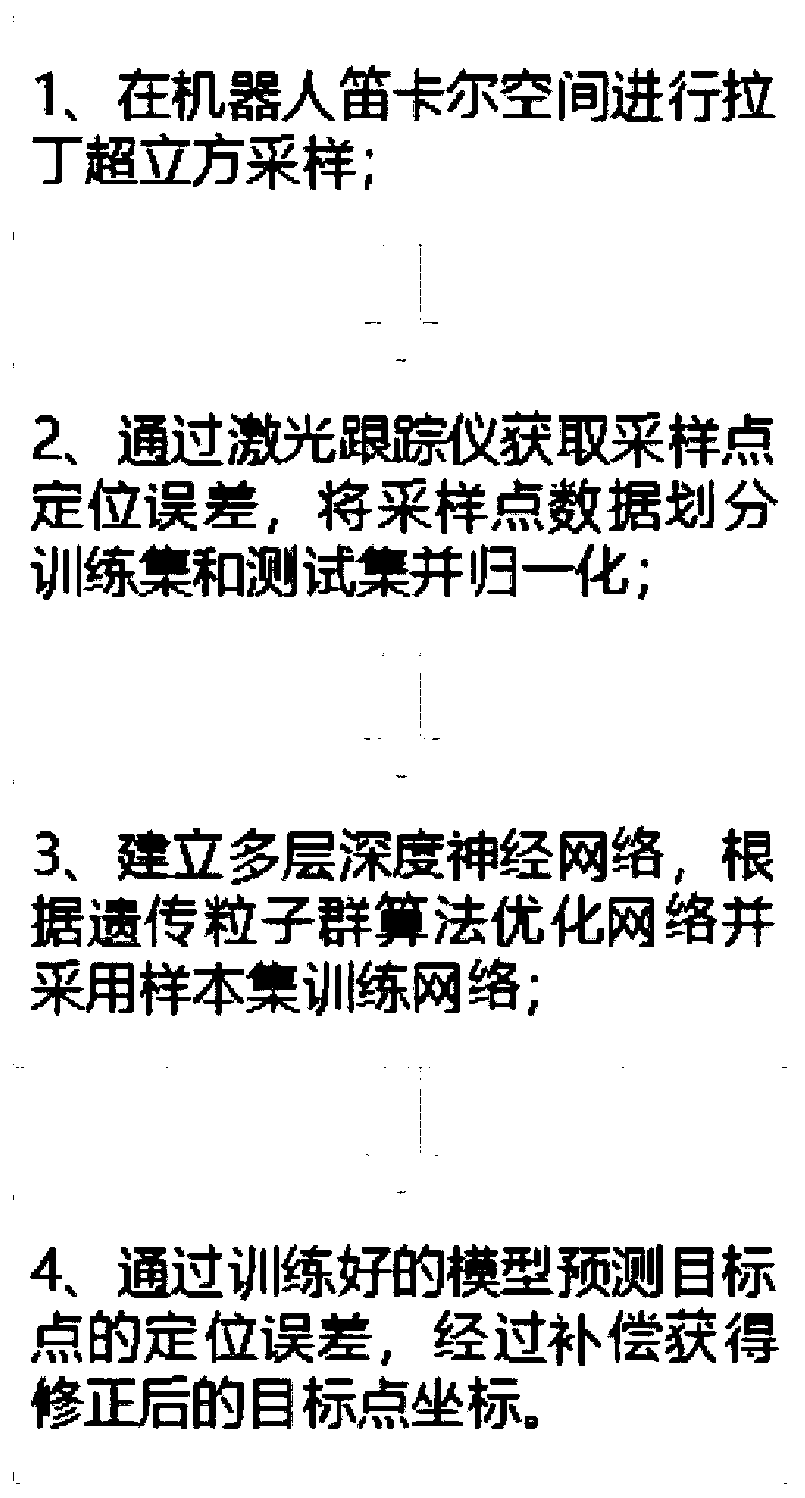
[0069] In order to better understand the technical content of the present invention, specific embodiments are given together with the attached drawings for description as follows.
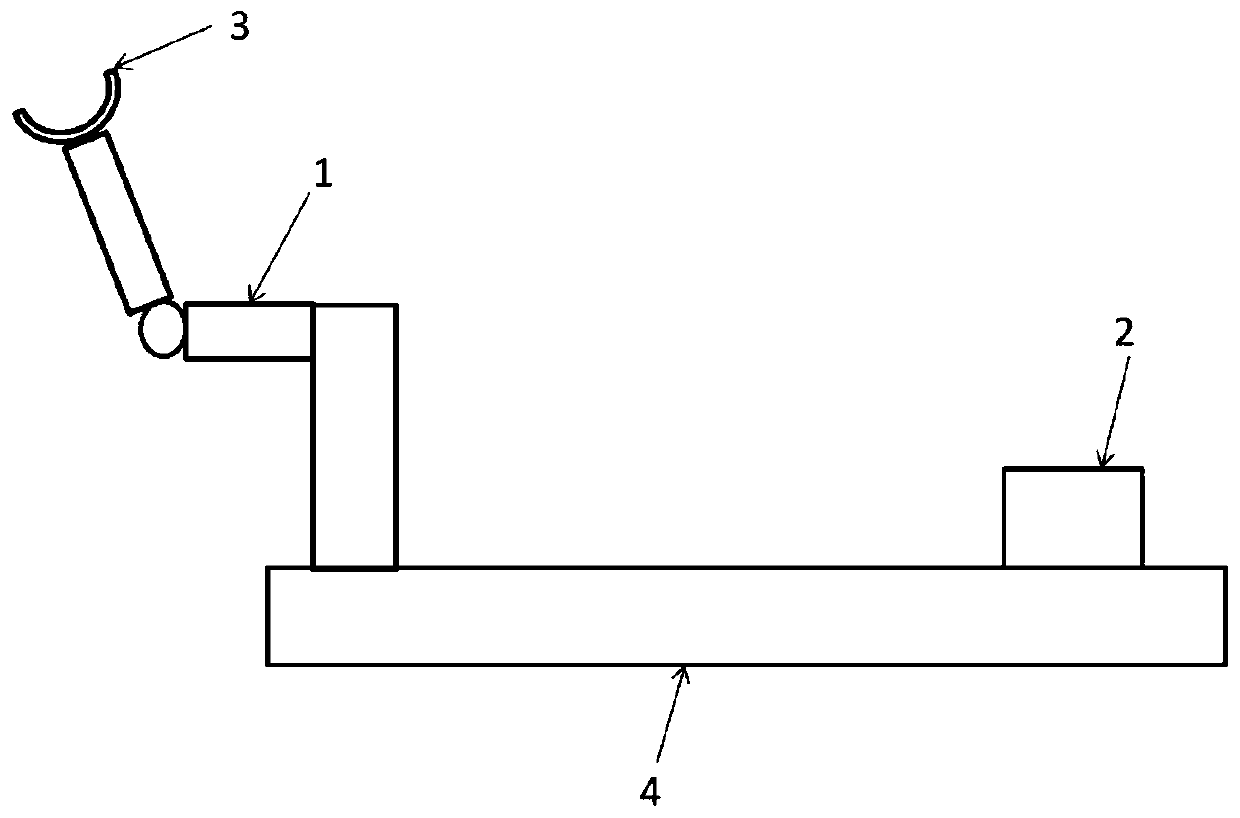
[0070] Below to figure 2 The test platform of wherein a kind of industrial robot shown is taken as an example to illustrate the specific implementation steps of the present invention:
[0071] The test platform of the industrial robot includes an industrial robot 1 and a laser tracker 2 installed on the guide rail 4. The end of the mechanical arm of the industrial robot 1 is provided with an end effector 3. The purpose of the present invention is to precisely operate the end effector 3 to the target point. If the theoretical coordinates of the target point are directly used as the execution target point of the industrial robot controller, due to the inherent positioning error of the industrial robot 1 itself, usually the actual arrival point position of the industrial robot will slightly deviate ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More