

Autonomous docking and recovery method of unmanned ship based on Tiny-YOLOship target detection algorithm
A technology of target detection algorithm and recovery method, which is applied in the field of self-recovery of unmanned boats, can solve problems such as unfavorable autonomous docking and recovery of unmanned boats, sharp fluctuations in steering angles, and increased errors, achieving strong real-time performance and improved accuracy , Improve the effect of docking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
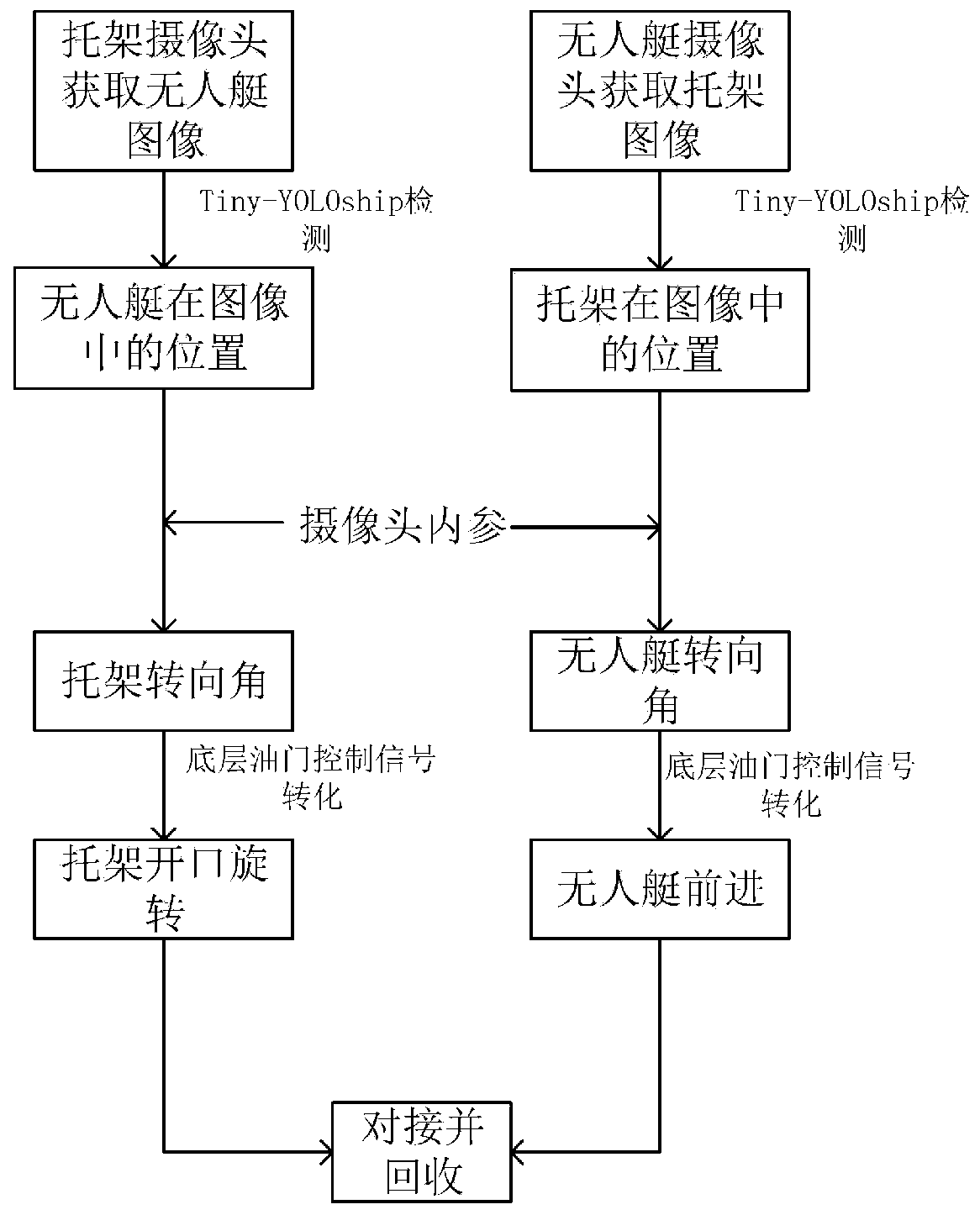
[0045] Such as Figure 1~6 A method for autonomous docking and recovery of unmanned boats based on the Tiny-YOLOship target detection algorithm is shown, such as figure 1 shown, including the following steps:
[0046] (1) Collect image data sets of unmanned boats and recovery brackets and divide the data sets into training set, verification set and test set. The specific process is as follows,
[0047] The camera set on the unmanned boat collects the video of the recovery bracket, and the camera set on the recovery bracket collects the video of the unmanned boat, and the collection is in different scenes such as the East China Sea, the Yellow Sea, Dingshan Lake, the South China Sea, and Meilan For the unmanned boat video and recovery bracket video under the lake, a picture is extracted every 15 frames of the video as a data set, and the target is marked with a label frame. The final unmanned boat data set has 2842 pieces, and the recovery bracket The dataset has 3743 images....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More