

Five-degree-of-freedom mechanical arm inverse kinematics solving method
An inverse kinematics and manipulator technology, applied in the field of inverse kinematics solution of multi-degree-of-freedom manipulators, can solve the problems of many iterations, slow convergence, high dependence on initial values, and achieve high precision and high speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the drawings.
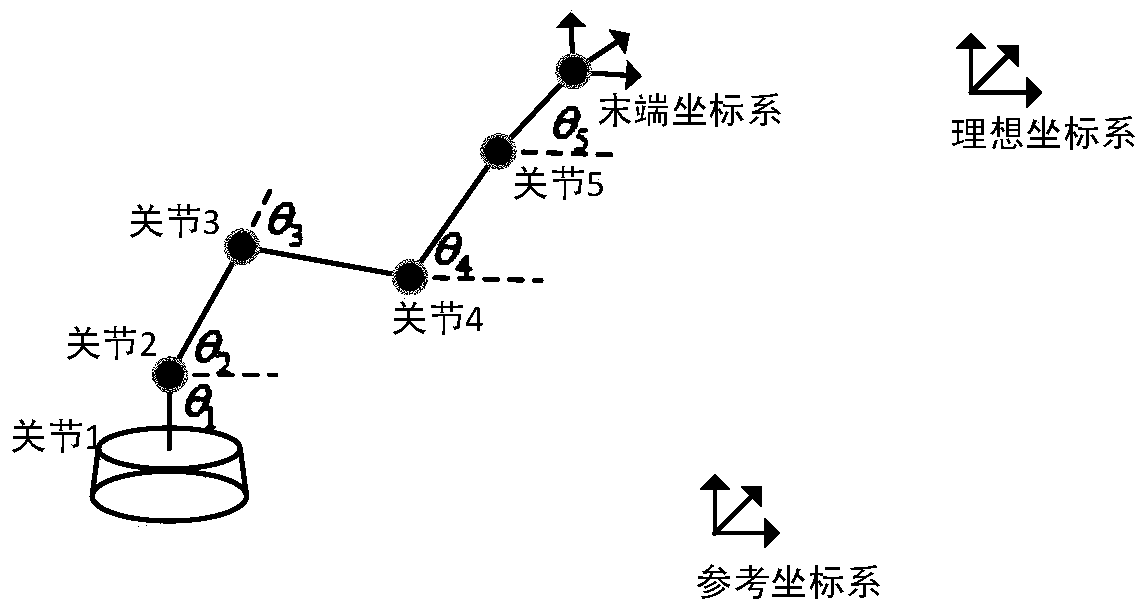
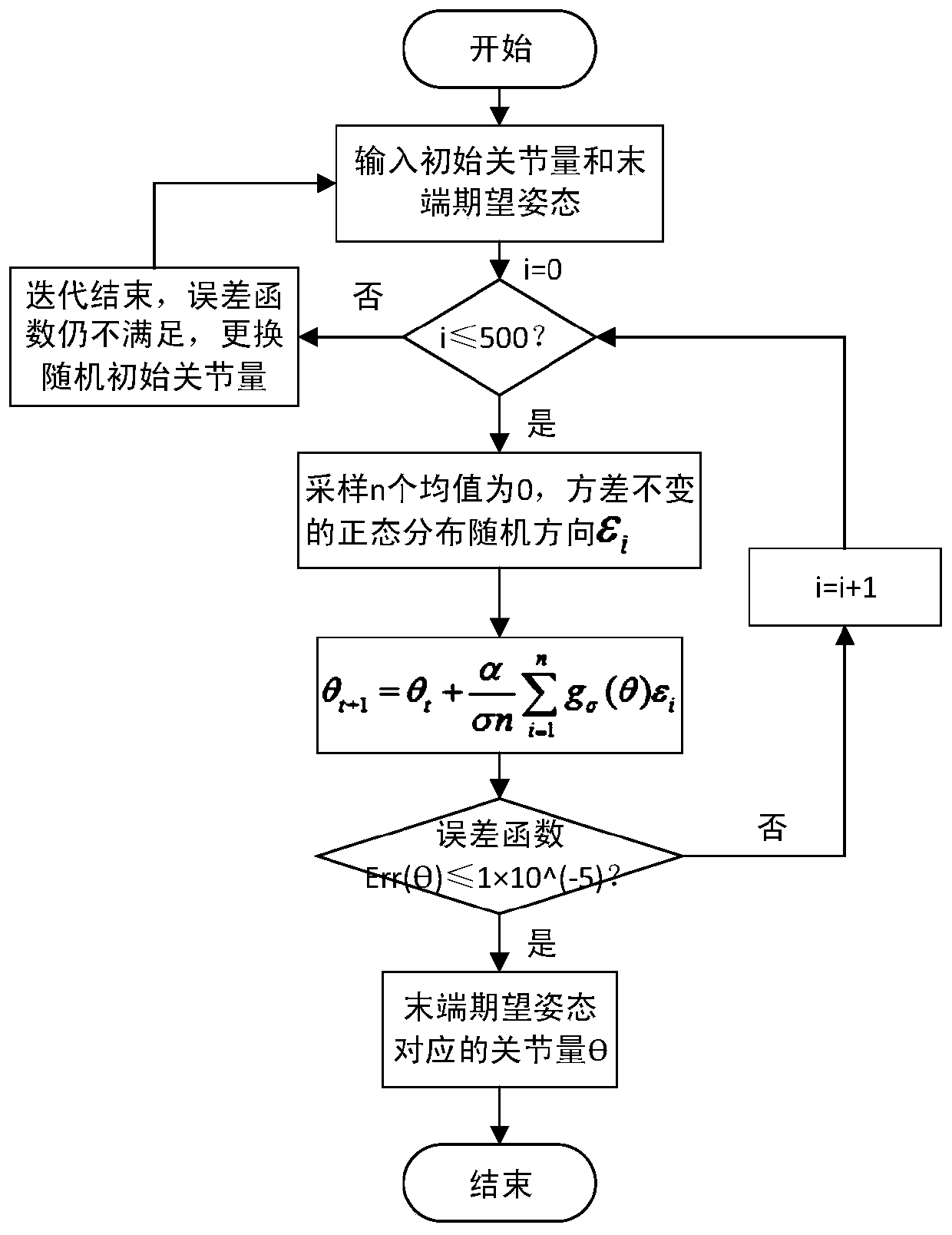
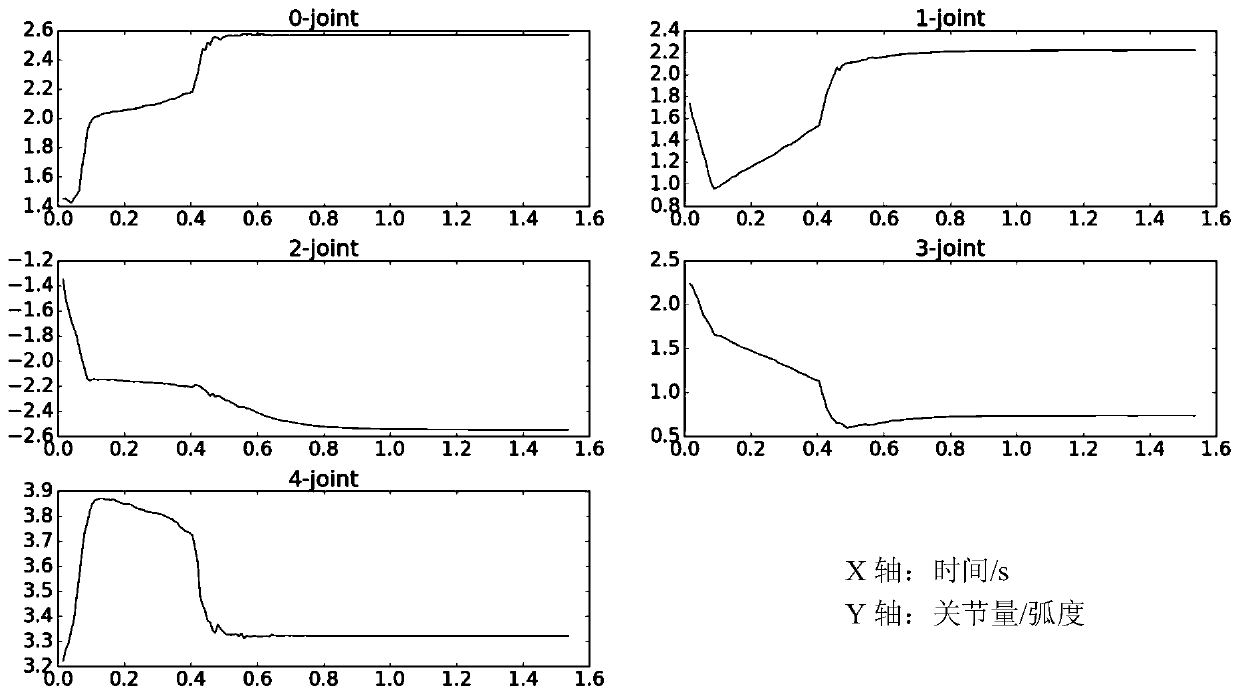
[0043] Reference Figure 1 ~ Figure 3 , An evolutionary strategy-based inverse kinematics solution of a 5-DOF manipulator, including the following steps:
[0044] 1) Establish a positive kinematics model based on the D-H parameters of the robotic arm
[0045] Table 1 is the D-H parameter table of Youbot robotic arm:
[0046]
[0047]
[0048] Table 1
[0049] Determine the coordinate system on each link of the robotic arm and the conversion relationship between its coordinate systems through the D-H parameter table. The transformation matrix A of the linkage coordinate system {i} relative to the coordinate system {i-1} i , The coordinate system transformation relation of two adjacent members is obtained according to the D-H rule:
[0050]
[0051] The meaning of each parameter of the above formula is that the member i first around the axis z relative to the member i-1 i-1 Rotation θ i Angle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More