

MEMS (Micro Electro Mechanical System) gyroscope drive/detecting modal preset performance anti-interference control method
A technology for detecting modal and preset performance, applied in gyroscope/steering sensing equipment, gyro effect for speed measurement, adaptive control, etc. Guarantee and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
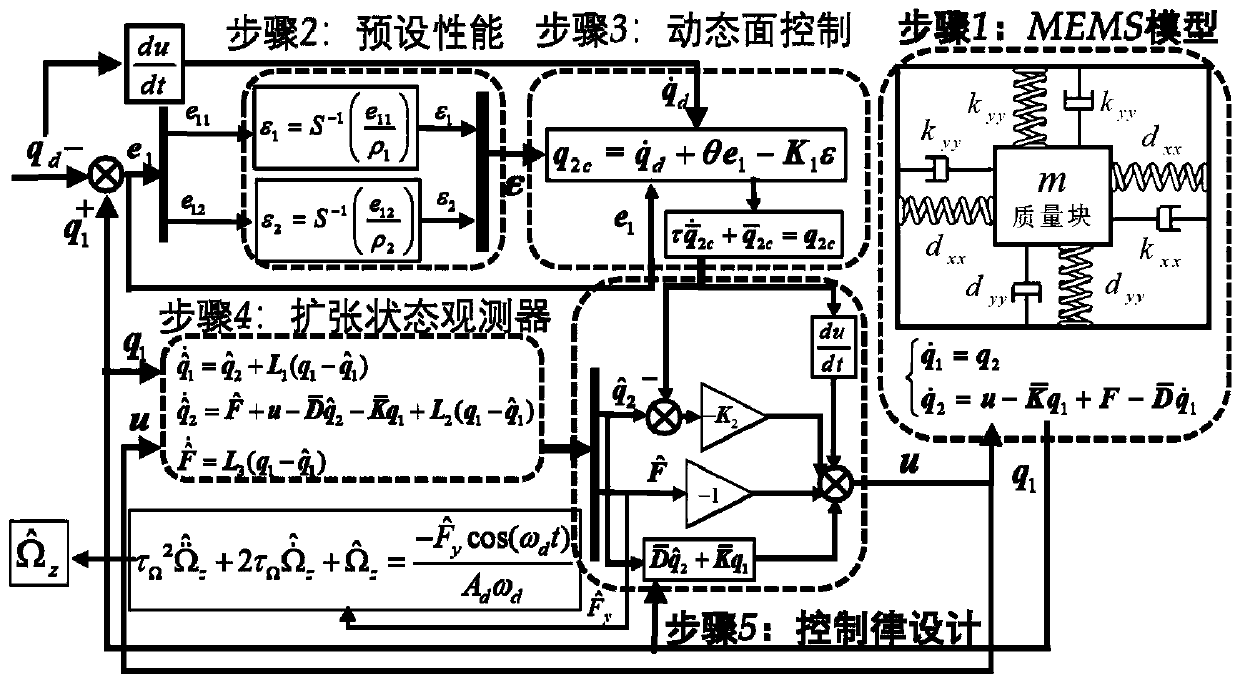
[0062] A MEMS gyroscope drive / detection mode preset performance anti-interference control method, comprising the following steps:
[0063] (1) Establish a strict feedback MEMS gyroscope dynamic model under the influence of external disturbance, parameter uncertainty and modal coupling multi-source disturbance;
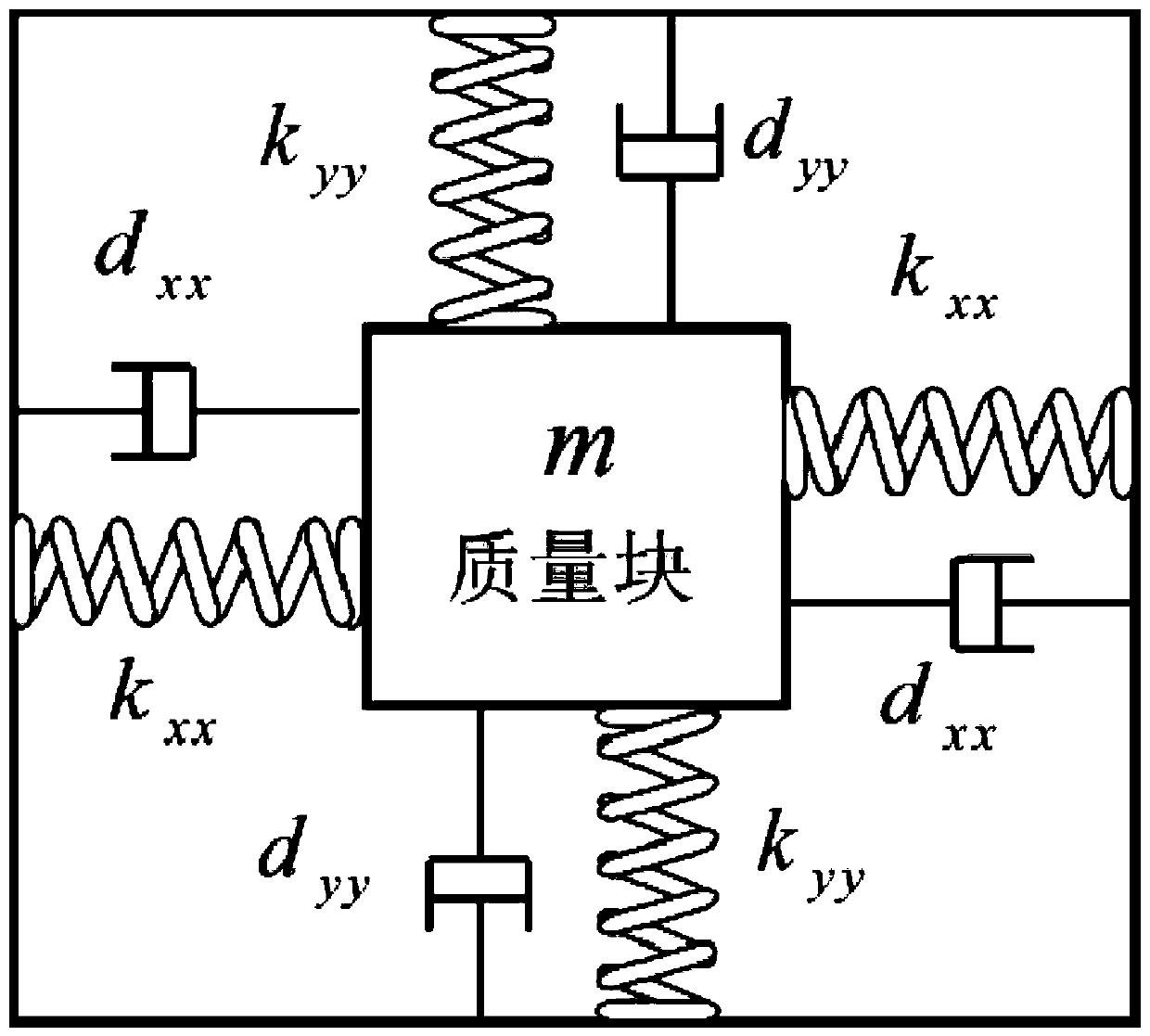
[0064] Establish a MEMS gyroscope dynamic model without external disturbance:
[0065]
[0066] Among them, m is the mass of the mass block, x and y are the linear displacement of the drive / detection mode gyroscope mass block respectively, with are the linear velocities of driving / detecting modal gyroscope masses, k xx and k yy are the two modal spring coefficients, d xx and d yy are the two modal damping coefficients, Ω z is the angular velocity to be sensitive, u x and u y It is the control input of the gyro drive / detect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More