

Fixed-time predetermined performance recurrent neural network mechanical arm control method
A technology of cyclic neural network and control method, which is applied in the field of fixed-time predetermined performance cyclic neural network manipulator control, which can solve the problems that the tracking error convergence cannot be guaranteed, and transient and steady-state performance cannot be considered.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0270] Example: Robotic Arm Driven by a DC Motor
[0271] Taking the manipulator driven by DC motor as an example to illustrate the effectiveness of the above fixed time predetermined performance cyclic neural network control method in realizing the ideal track of the driven manipulator. The mathematical model of the manipulator composed of the mechanical subsystem (1) and the electrical subsystem (2) can be expressed as:
[0272]
[0273] The system parameters are selected as L=0.05,K B =0.5, R=0.5, ΔI=0.1cos(t). The dead zone model can be written as:
[0274]
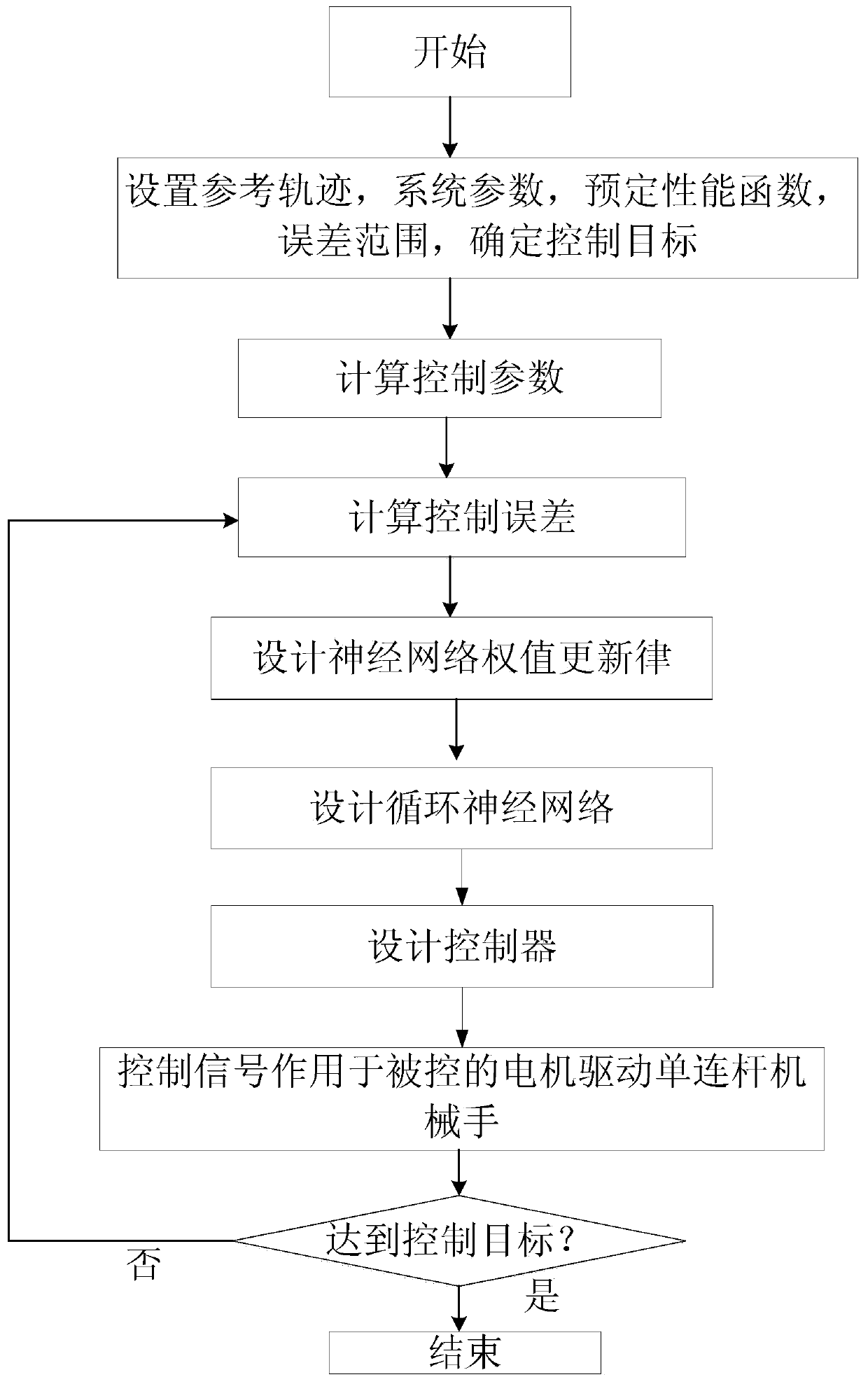
[0275] A neural network control method for a fixed time predetermined performance of a DC motor-driven mechanical arm of the present embodiment includes the following steps:
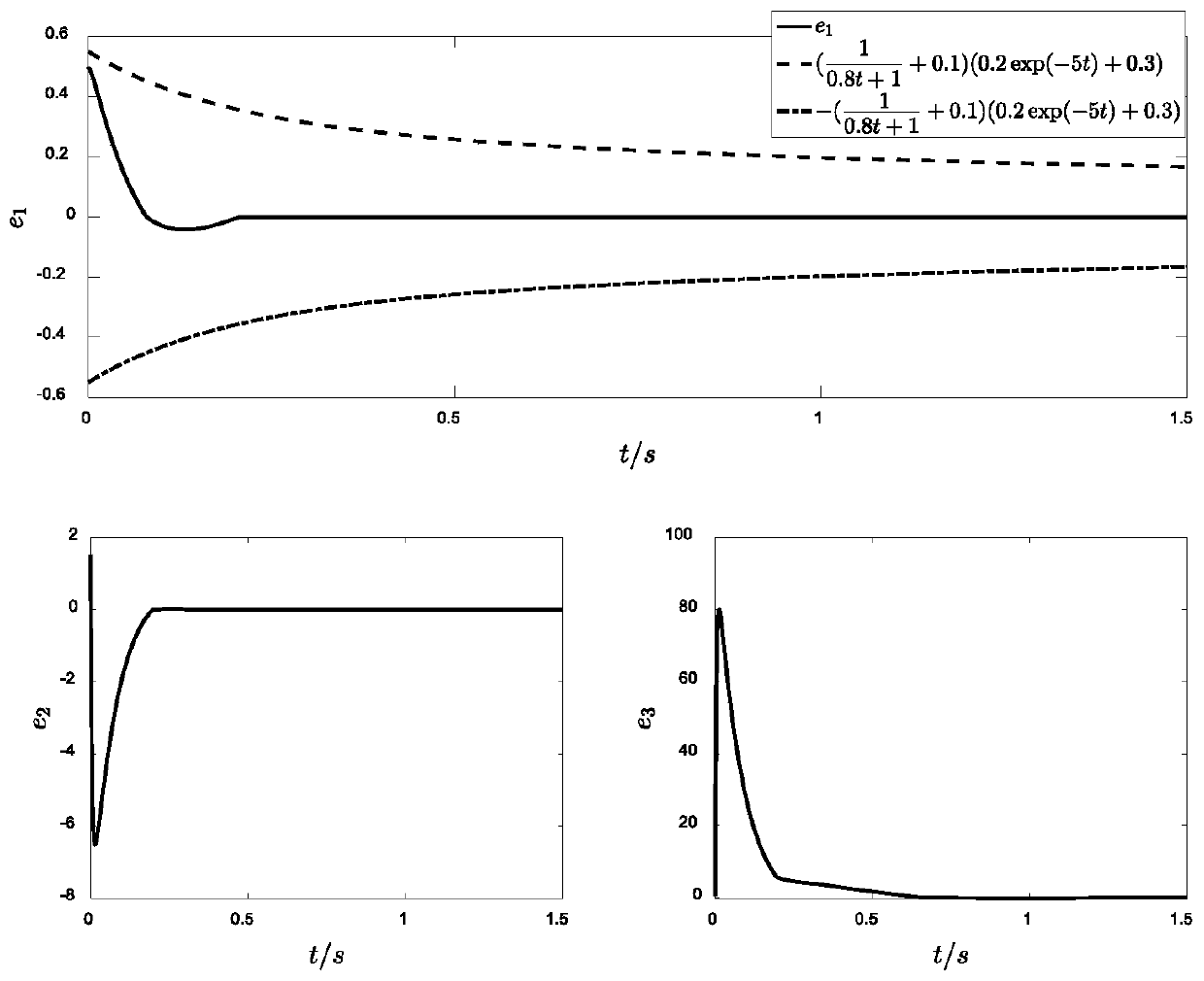
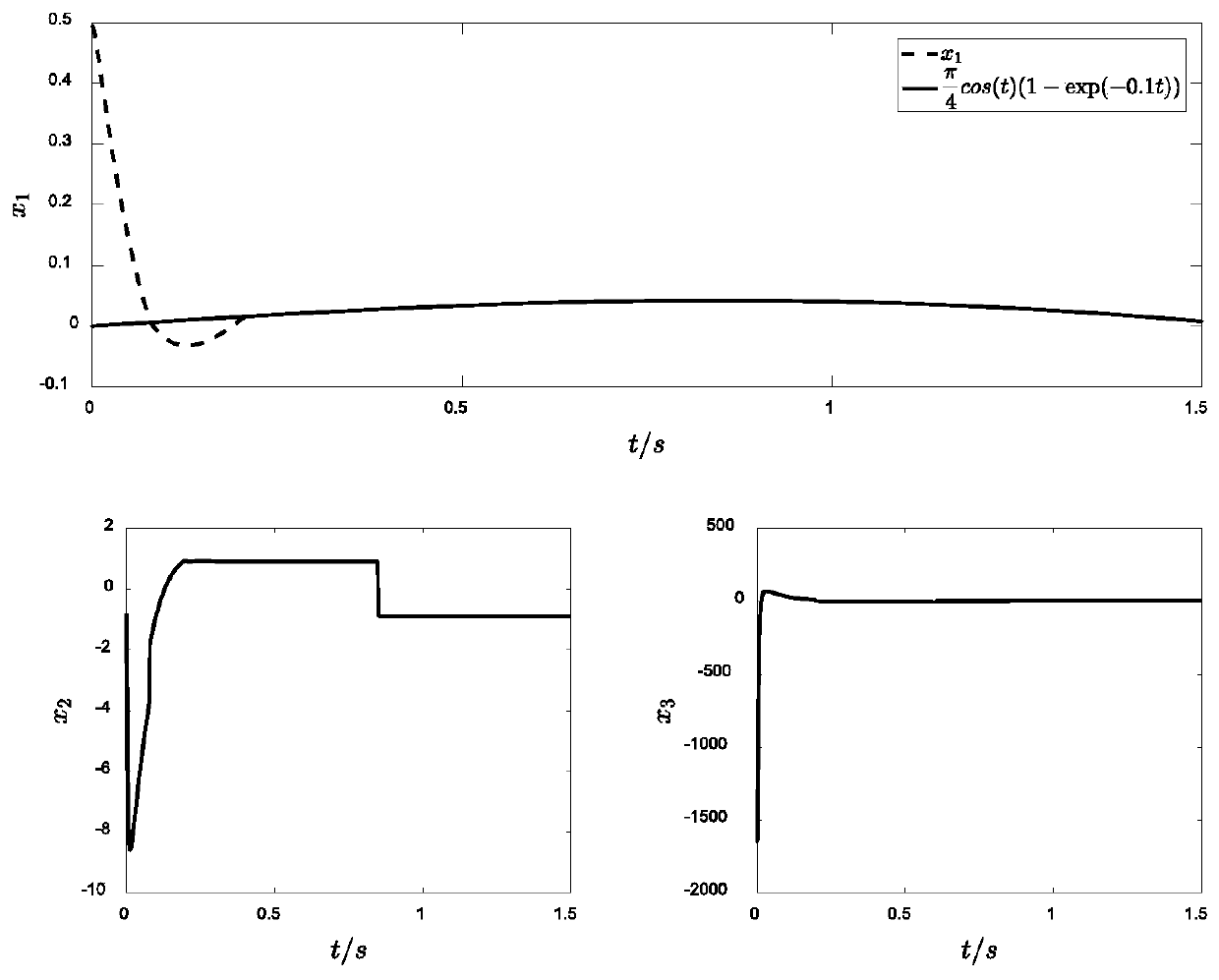
[0276] (1) Determine the control target: the reference output signal is selected as The predetermined performance function is chosen as The control target is determined as the system output can track the reference output of the sy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More