

Trajectory tracking control methods and trajectory tracking systems
A control method and trajectory tracking technology, applied in general control systems, control/regulation systems, digital control, etc., can solve problems such as no trajectory tracking system, large trajectory tracking error, and inability to complete the trajectory tracking purpose
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
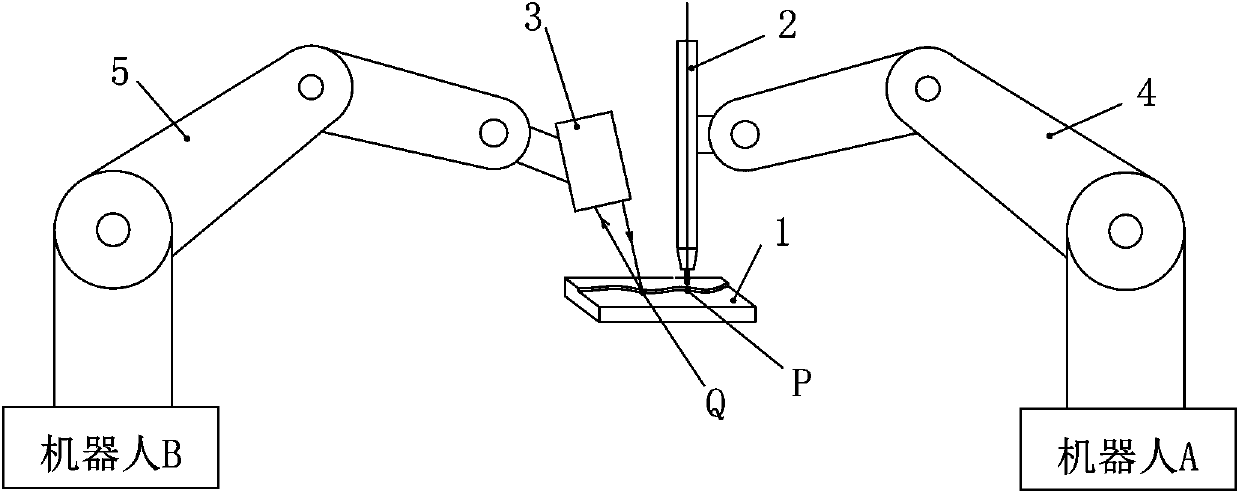
[0210] This trajectory tracking control method is used in situations where the sensor 3 and the tool 2 are respectively driven by different branch chains. see figure 1 As shown, there are two branch chains here: tool branch chain 4 and sensor branch chain 5, tool 2 is attached to tool branch chain 4 and tool 2 is driven by tool branch chain 4, sensor 3 is attached to sensor branch chain 5 and sensor 3 is driven by the sensor branch chain 5, and the relative position between the sensor 3 and the tool 2 has a definite geometric relationship. The sensor branch chain 5 and the tool branch chain 4 can be two branch chains on the same actuator, or a branch chain composed of two separate actuators. The forward speed at which the sensor branch chain 5 drives the sensor 3 can be the same as that at which the tool branch chain 4 drives the tool 2 forward, that is, the sensor 3 and the tool 2 can advance at the same forward speed. The forward speed and the forward speed of the tool bra...
Embodiment 2
[0277] The difference between this embodiment and Embodiment 1 is that this embodiment is based on the reference point Ref-A, and instead of using the above-mentioned current control reference point Ref-A as the tracking target, it uses the control interval time t The subsequent control reference point Ref-A-next is the tracking target. In this embodiment, the specific determination method of determining the target position of tool 2 at the next moment according to the trajectory position information set {Q} is as follows:
[0278] Take the reference point Ref-A as the center of the sphere, and make a sphere with △=V*t as the radius. There are two intersection points between the sphere and the trajectory feature line, and the intersection of the sphere and the trajectory feature line in the tool’s forward direction is taken as the control reference point Ref-A-next, with the control reference point Ref-A-next as the tracking target, determine the tool coordinate system at the ...
Embodiment 3
[0283] The difference between this embodiment and Embodiment 1 is that in this embodiment, in the fourth step of determining the target, the position and posture of the detection point of the sensor at the next moment are determined according to the trajectory position information set {Q}, and the position of the detection point of the tool at the next moment is determined. On the basis of the target position and attitude of the sensor, the first position and attitude deviation information between the position of the sensor detection point at the current moment and the position of the sensor detection point at the next moment, the target position of the tool at the current moment and the position of the tool at the next moment Regarding the second position and attitude deviation information between the target positions, the other steps of the trajectory tracking control method and the specific development of each step are the same as those in Embodiment 1, and will not be repeat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More