

Intelligent measurement robot system based on BIM and measurement method
A robot system and measuring robot technology, which is applied in the field of rapid acquisition and analysis system of high-precision three-dimensional absolute coordinate data, can solve the problems of cumbersome calculation of internal data, low efficiency of external measurement, and high labor intensity, so as to improve construction measurement. Efficiency and quality, shortening office working hours, and reducing labor intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
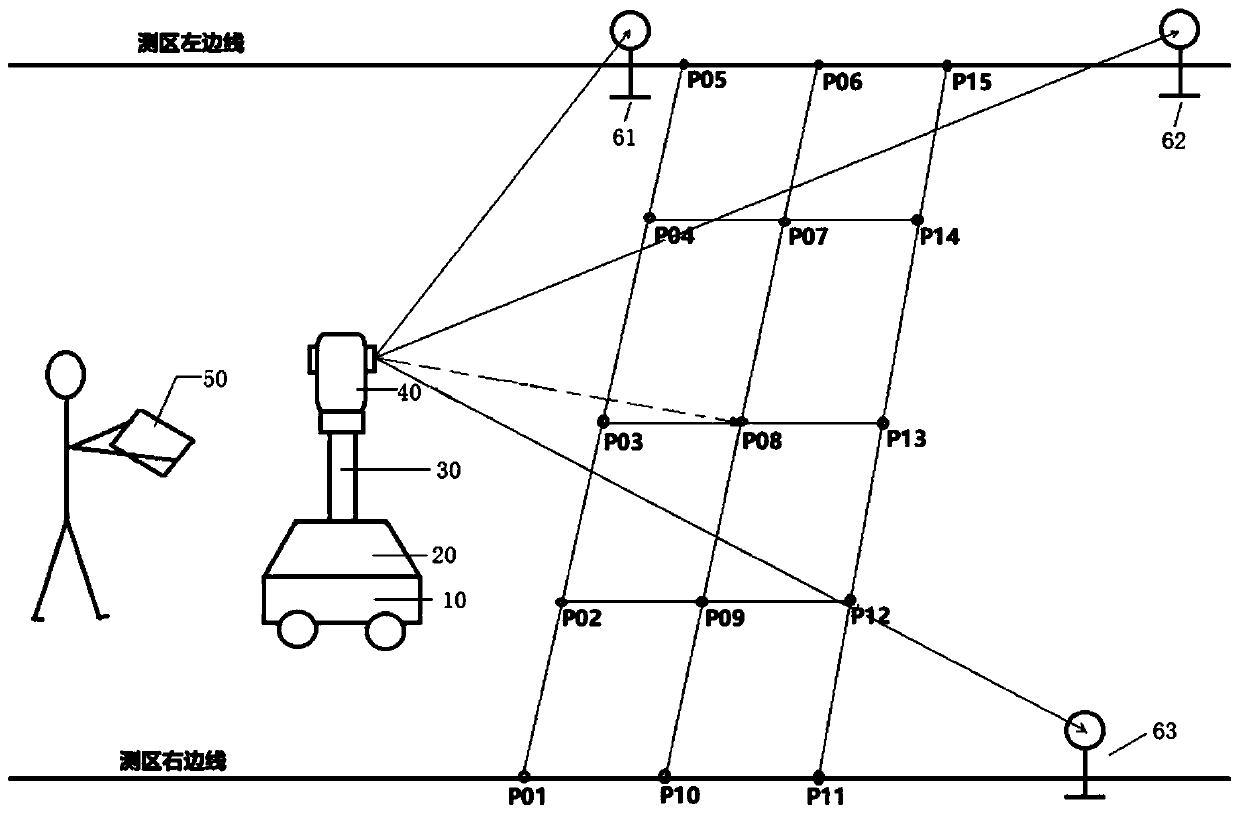
[0049] Such as figure 1 As shown, a BIM-based intelligent measurement robot system includes a measurement robot, a handheld terminal 50, and a 360° prism.
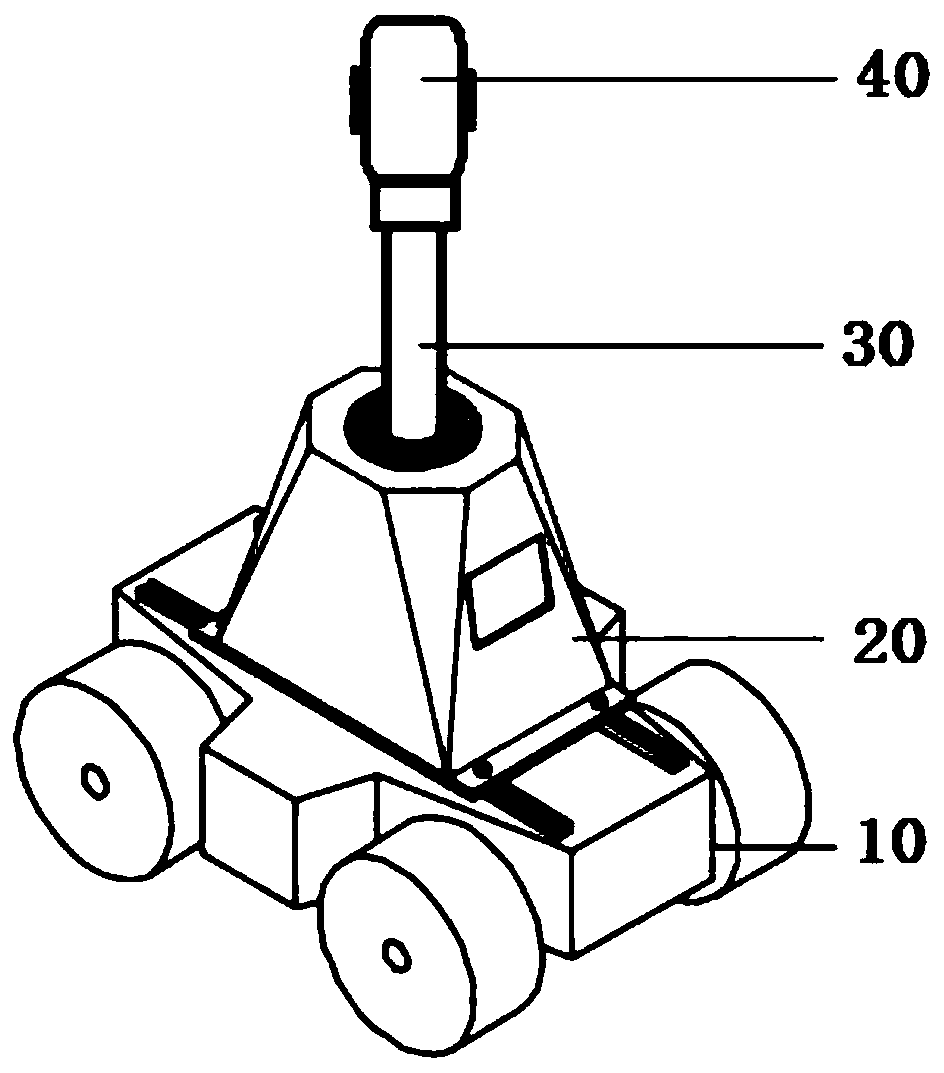
[0050] Such as figure 2 As shown, the measuring robot includes a mobile chassis 10 , a master control device 20 , a leveling device 30 , and an intelligent total station 40 . The master control device 20 is mounted on the mobile chassis 10 , the leveling device 30 is mounted on the master control device 20 , and the intelligent total station 40 is mounted on the top of the leveling device 30 . The intelligent total station 40 is leveled to a horizontal state through the leveling device 30 . There are three 360° prisms, respectively the first 360° prism 61, the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More