

Control method and control system for multiple robots
A multi-robot and control method technology, applied in the direction of program control of manipulators, instruments, manipulators, etc., can solve the problems of interactive information expansion, commander burden, system model complexity increase, etc., to achieve efficient general control and simple control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
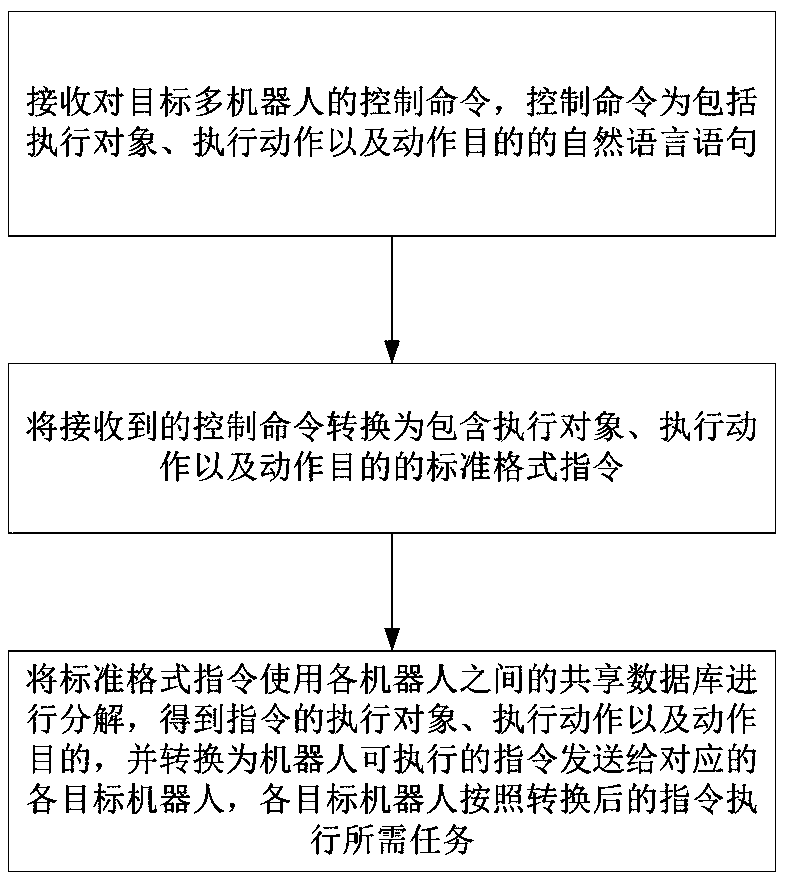
[0037] Such as figure 1 As shown, the steps of the control method for multi-robots in this embodiment include:
[0038] S1. Receive the control command for the target multi-robot, the control command is a natural language statement including the execution object, execution action and action purpose;
[0039] S2. Convert the control command received in step S1 into a standard format instruction including the execution object, execution action and action purpose;
[0040] S3. Distributed control: Decompose the standard format instructions converted in step S2 using the shared database between the robots to obtain the execution objects, execution actions, and action purposes of the instructions, and convert them into executable instructions for the robot and send ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More