

Combined calibration method between three-dimensional laser radar and mechanical arm of mobile operation robot
A 3D laser and mobile operation technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of not being able to meet the 3D environment perception of mobile operation robots, the inability of 2D lasers to complete 3D environment perception, and the impact of calibration results, so as to reduce dependence and improve The effect of calibration accuracy and simple calibration process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
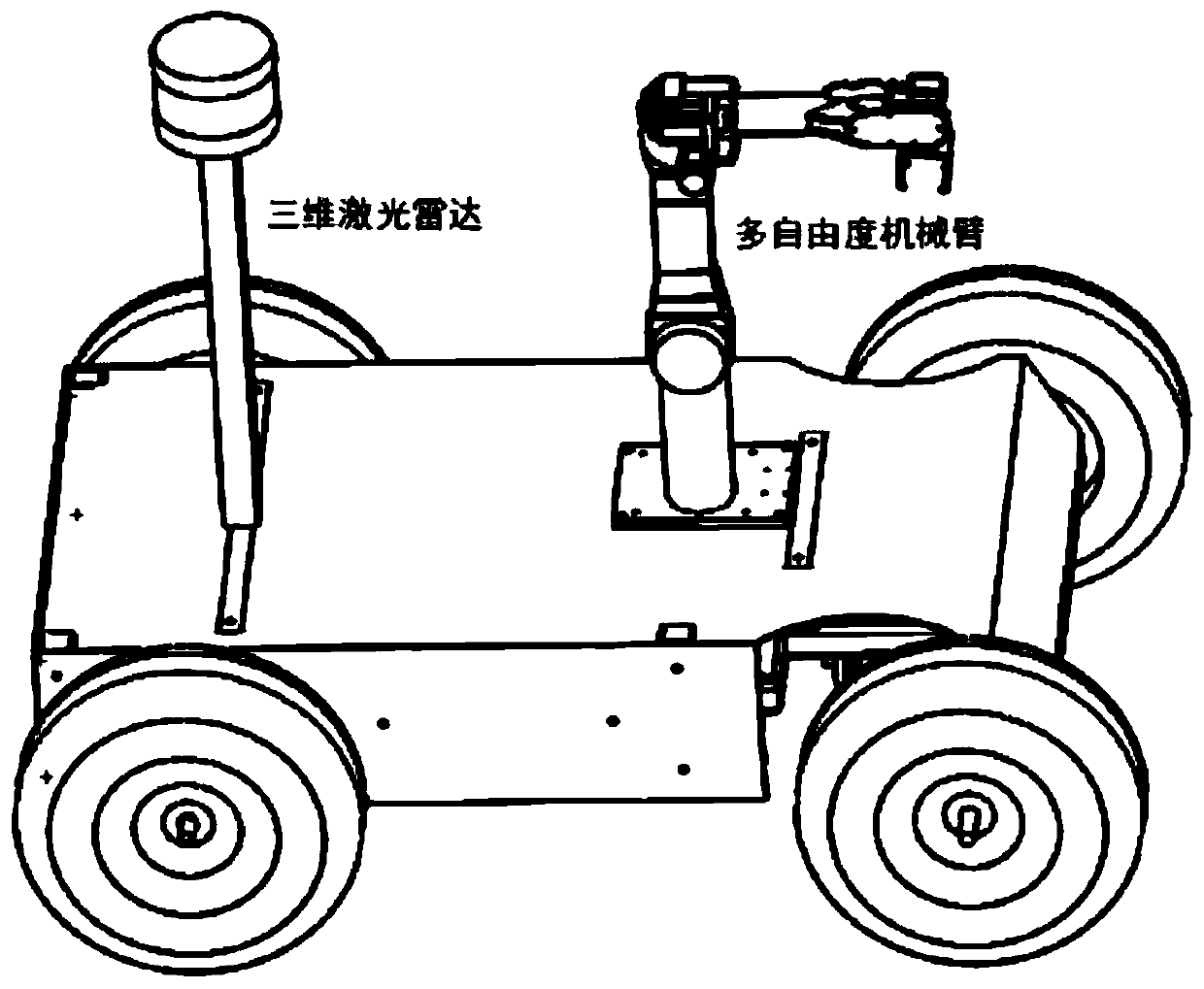
[0050] The three-dimensional laser radar used in the specific implementation process of the present invention is the 16-line laser VLP-16 of Velodyne Company, the mechanical arm is a 6-DOF robotic arm SRQ05A-6D and its corresponding controller, and the square cardboard held by the end of the mechanical arm is a square Cardboard with a side length of 10 cm. The method proposed in the present invention is also suitable for 32-, 64-line or other specifications of three-dimensional laser radar, as well as mechanical arms with other degrees of freedom.
[0051] Take the text’s invention of 3D laser radar and robotic arm as an example, especially the 16-line 3D laser and 6-axis robotic arm. The horizontal scanning angle of the 3D laser is 360 degrees, the vertical scanning angle is ±15 degrees, the scanning frequency is 10Hz, and about 300,000 point cloud data are collected per second; the 6-axis robotic arm has 6 degrees of freedom, the payload is 5kg, and the joints run The speed...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Width | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More