

Estimation and self-healing control method for blade injury of multi-rotor unmanned aerial vehicle autopilot
A multi-rotor unmanned aerial vehicle, self-healing control technology, applied in the direction of non-electric variable control, control/regulation system, three-dimensional position/course control, etc., can solve the problems of failure estimation and model reconstruction of the propeller, so as to ensure safety The effect of stable flight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
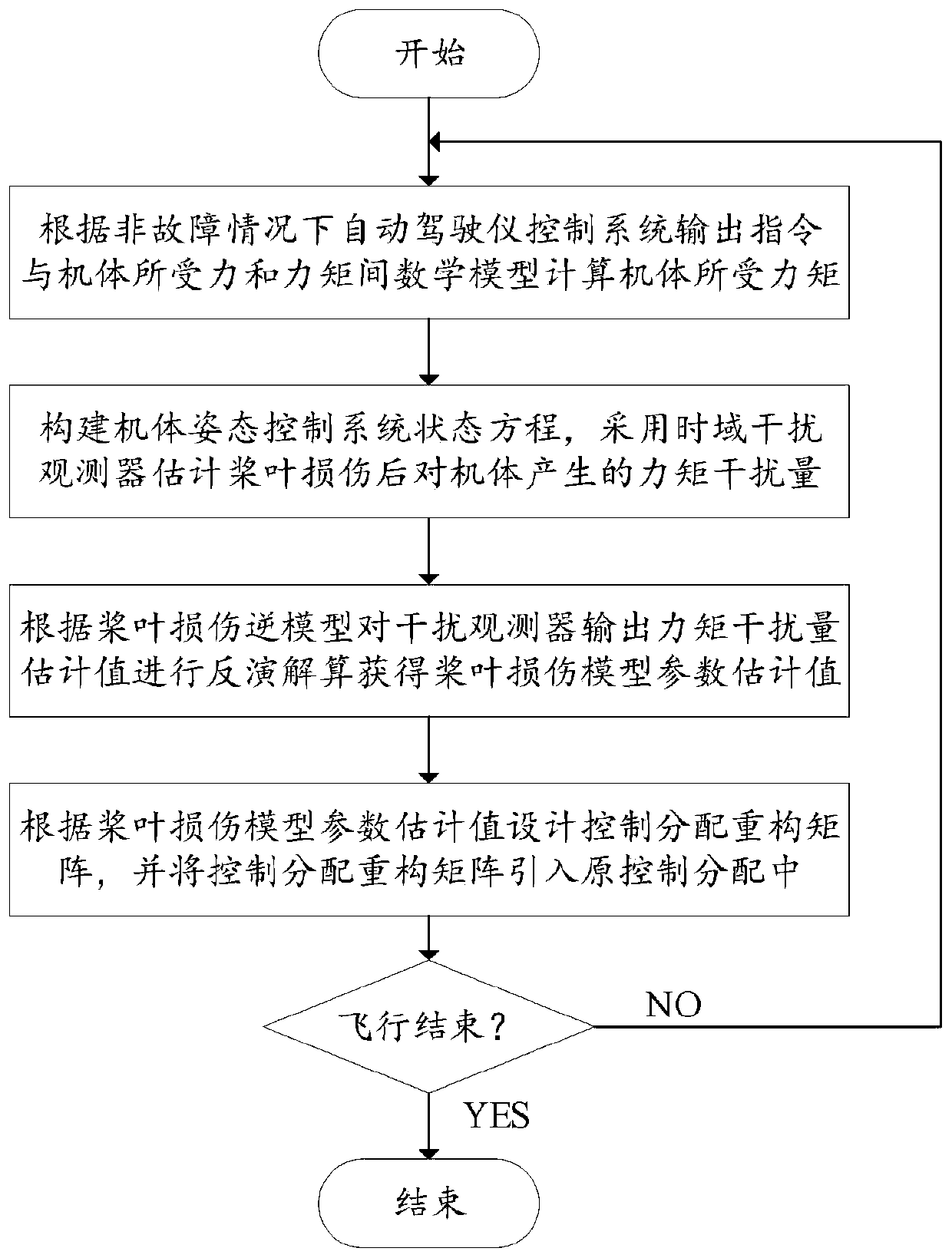
[0050] like figure 1 As shown, the method of the present invention is: first build the mathematical model between the autopilot control system output command σ and the body's suffered force and moment under the non-failure situation, and calculate the body's suffered moment τ, then build the body attitude control system state equation, The time-domain disturbance observer is used to estimate the torque disturbance generated by the blade damage to the airframe, and then the estimated values of the parameters of the blade damage model are calculated according to the inverse model of the blade damage, and finally the control assignment is designed according to the estimated values of the parameters of the blade damage model Reconfigure the matrix R to realize the reconfiguration of autopilot control assignment. Compared with the prior art, an estimation and self-healing control method for blade damage of a multi-rotor UAV autopilot according to the present invention has the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More