

Semantic SLAM system and method based on joint constraints
A semantic and semantic map technology, applied in the field of computer vision, can solve the problems of unable to construct, unable to calculate camera pose, inaccurate calculation of camera pose, etc., to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
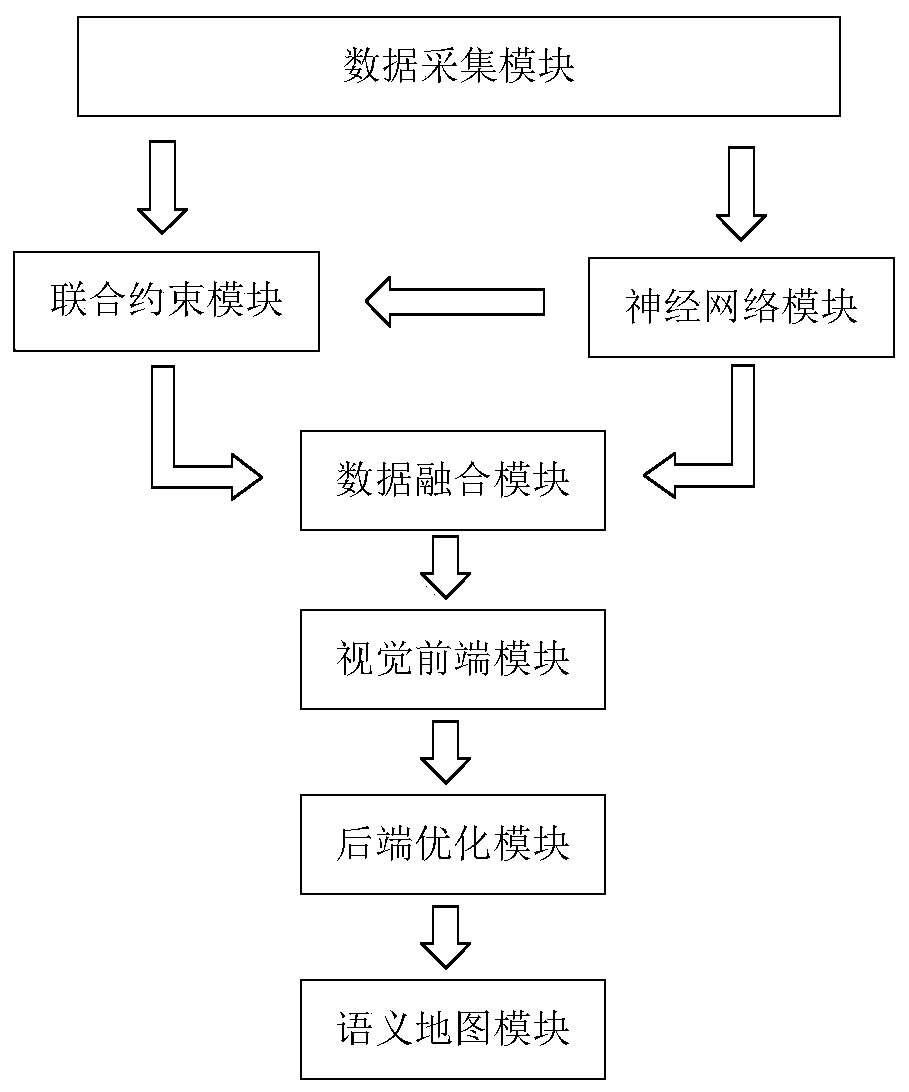
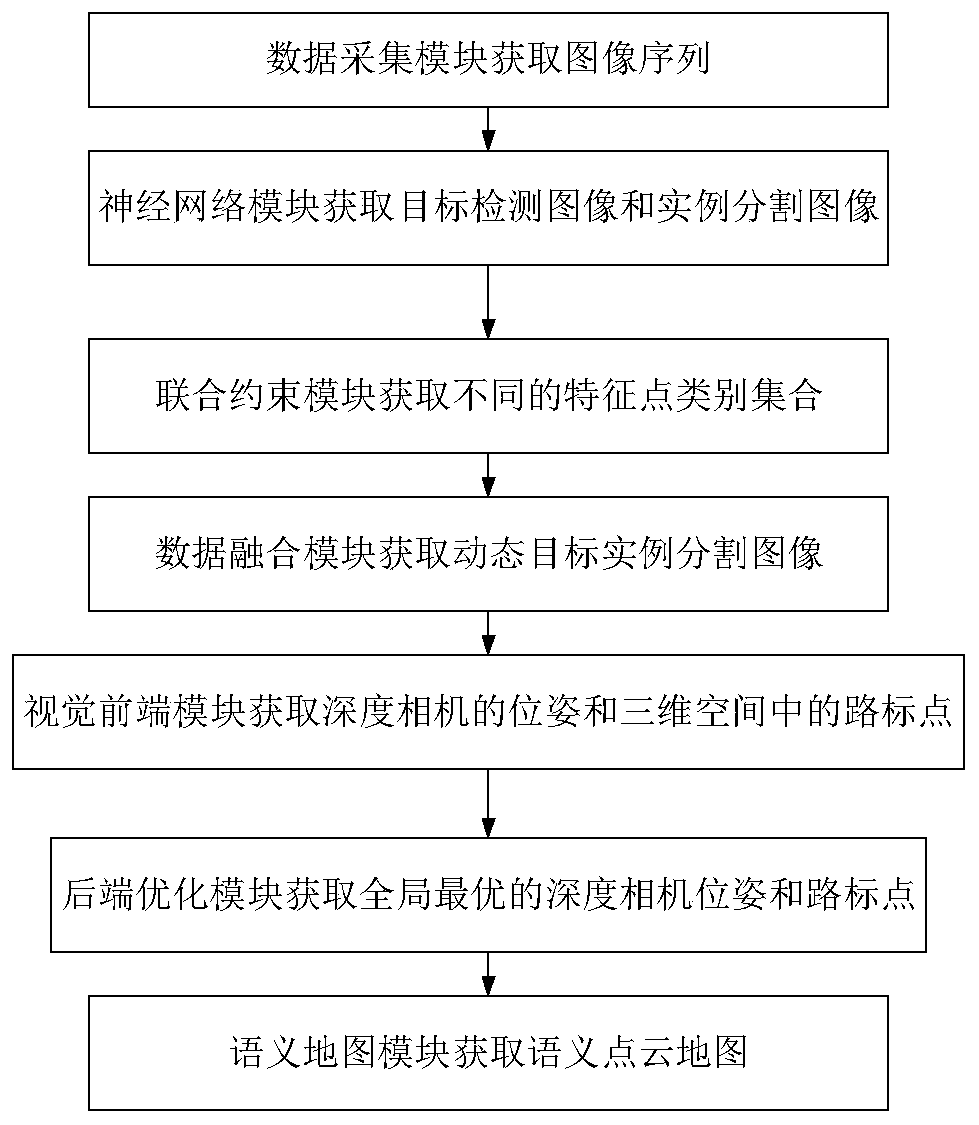
[0046] refer to figure 1 , the semantic SLAM system based on the joint constraint of the present invention includes a data acquisition module, a neural network module, a joint constraint module, a data fusion module, a visual front-end module, a back-end optimization module and a semantic map module, wherein:
[0047] The data acquisition module adopts a depth camera and is used to collect multiple frames of depth images and color images of the indoor environment to obtain depth image sequences and color image sequences;
[0048] The neural network module is used to perform forward propagation processing on the color image sequence frame by frame by training the BlitzNet network model, so as to obtain the detection image with the potential dynamic target frame and the instance segmentation image with the potential dynamic target insta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More