Multi-target object tracking method fusing object capture and recognition technology
A recognition technology and target tracking technology, applied in the field of multi-target object tracking, can solve the problems that the Camshift algorithm is susceptible to interference from complex backgrounds, it is difficult to deal with background colors, and target comparison is prone to failure, so as to reduce the tracking loss rate and solve the problem of Effect of Tracking Inaccuracy, Improving Correctness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the technical means of the present invention and the technical effects that can be achieved more clearly and more perfectly disclosed, the following embodiments are provided hereby, and the following detailed descriptions are made in conjunction with the accompanying drawings:
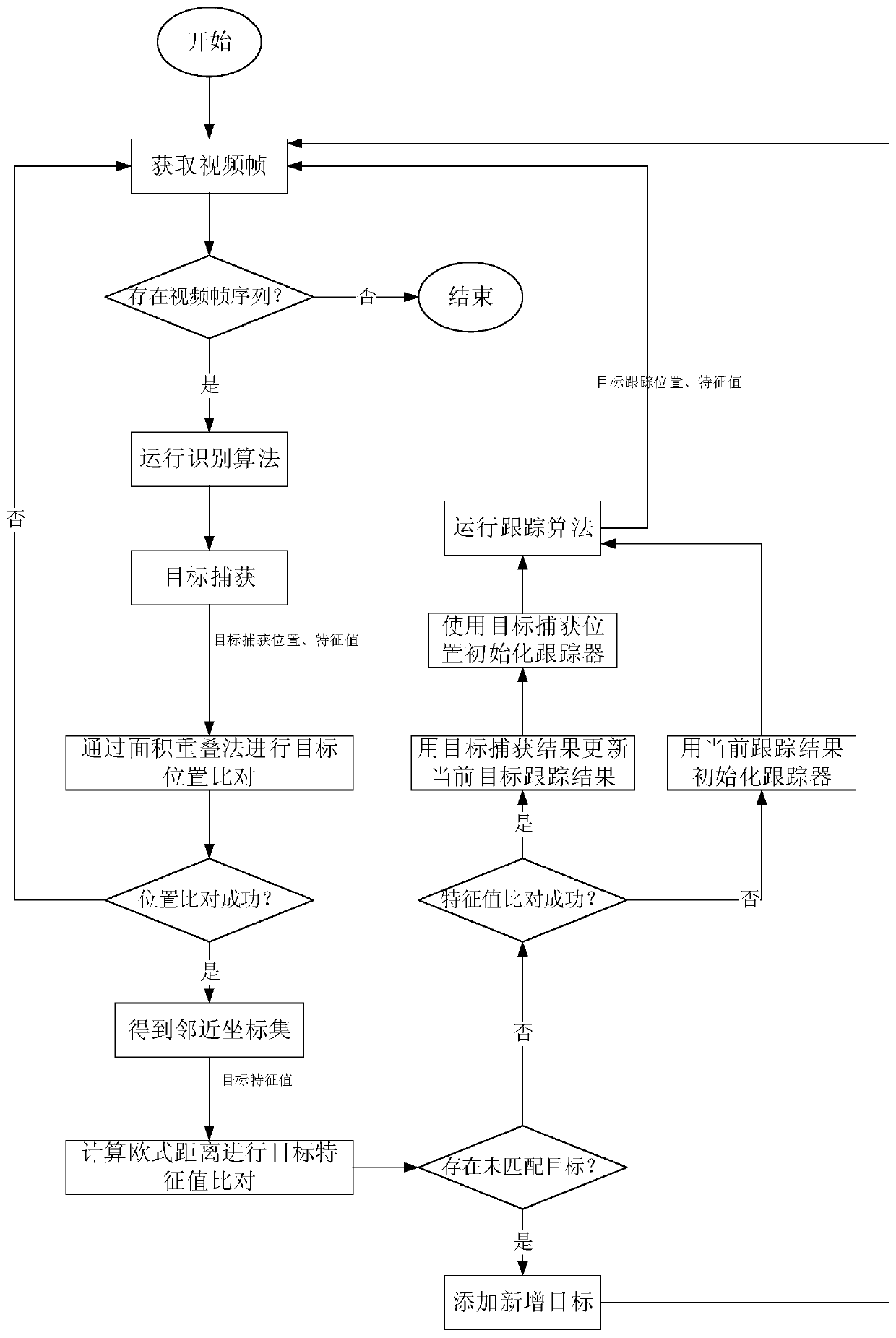
[0031] Such as figure 1 As shown, a multi-target object tracking method fused with object capture and recognition technology in this embodiment,
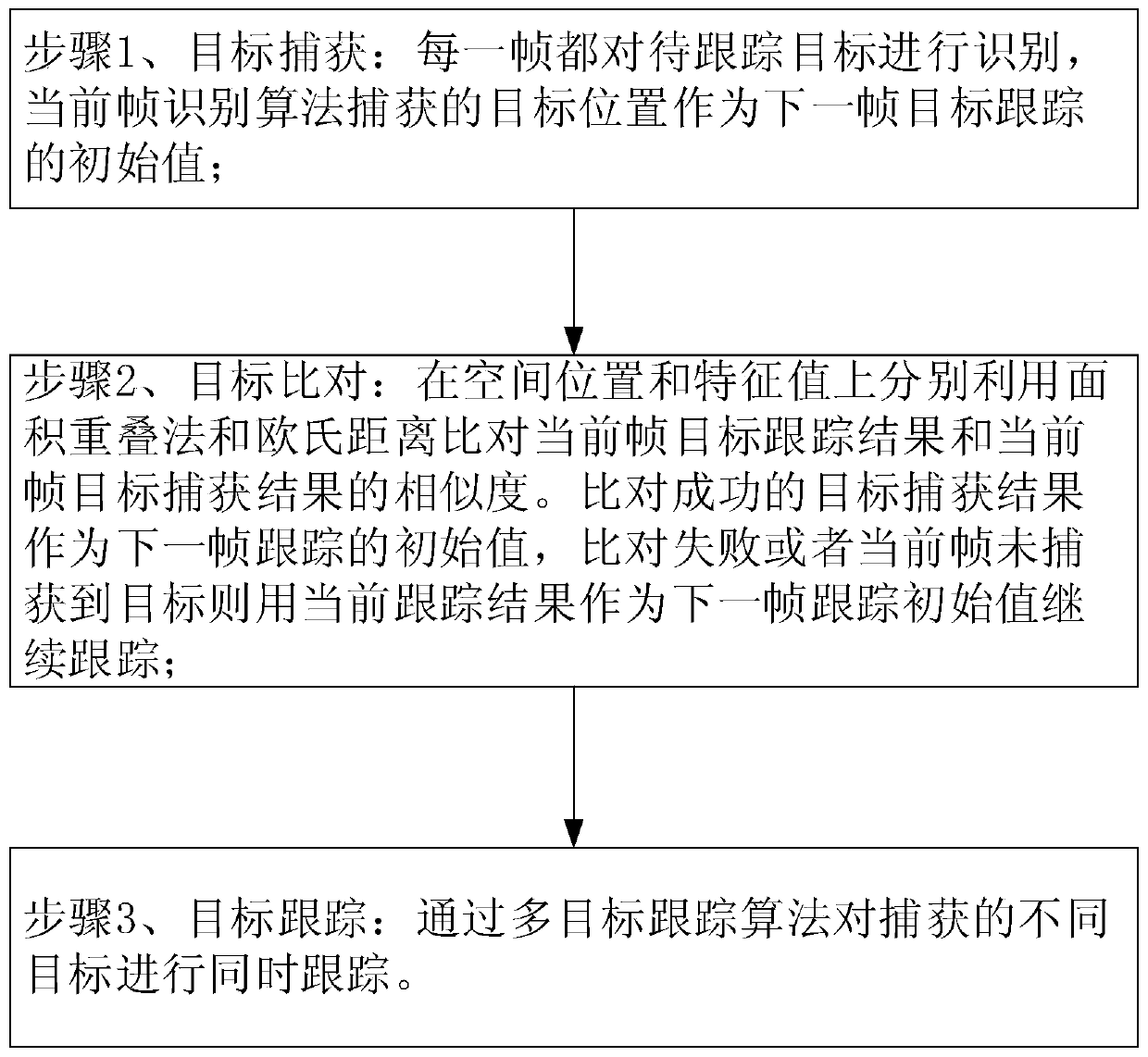
[0032] Including the following steps:
[0033] Step 1. Target capture: Identify the target to be tracked in each frame, and the target position captured by the recognition algorithm of the current frame is used as the initial value of the target tracking in the next frame.
[0034] Input the frame sequence of the video stream, obtain the video frame, call the target recognition algorithm to obtain the target position and target features of the current frame, add the recognition position set, and number the target.
[0035] Step 2. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More