

Unmanned aerial vehicle path planning method and device
A path planning and UAV technology, applied in the direction of navigation calculation tools, etc., can solve the problems of time minimization and the interaction of path changes.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
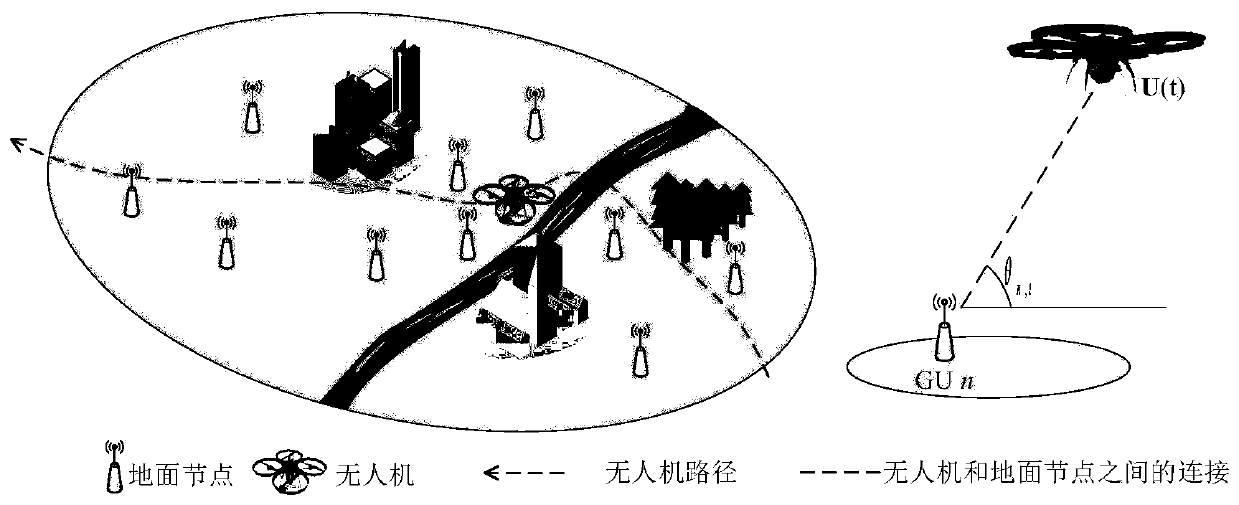
[0025] Such as figure 1 As shown, a UAV path planning method, in the urban scene, N ground nodes construct a topological network, establish a three-dimensional coordinate system, the dotted line is the flight path of the UAV, and the connection between the UAV and the ground node n The angle between the line and the horizontal direction is θ, assuming that the ground coordinates of all ground nodes in the coordinate system are known, and the drone is assumed to be at a fixed height by default, and the projection of the flight path of the drone on the ground is U(t ), all coordinates in the following content of the present invention refer to ground coordinates.
[0026] Specific steps include:
[0027] S01, according to the coordinates of the ground node or the number of neighbor nodes of the ground node, determine the ground node visit sequence;
[0028] Here are two means to determine the access order of ground nodes:
[0029] One is the position of ground nodes, that is, ...
Embodiment 2
[0093] On the basis of the first embodiment above, the embodiment of the present invention also provides a UAV path planning device, including a memory and a processor, the memory stores a UAV path planning program, and the processor runs the UAV The steps of the UAV path planning method are executed when the UAV path planning program is used. Since the UAV path planning method in the above-mentioned first embodiment is adopted, it also has the technical effects of any of the above-mentioned embodiments, and will not be repeated here.
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More