

AGV control method
A control method and trolley technology, applied in the direction of program control, comprehensive factory control, comprehensive factory control, etc., can solve problems such as low work efficiency, time-consuming and laborious, improper AGV control, etc., to reduce labor, improve work efficiency, and improve informationization horizontal effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The specific implementation manners according to the present invention will be described below in conjunction with the accompanying drawings.
[0035] In the following description, many specific details are set forth in order to fully understand the present invention, but the present invention can also be implemented in other ways different from those described here, therefore, the present invention is not limited to the specific embodiments disclosed below limit.
[0036] In order to solve the problems of improper control of the AGV, time-consuming and labor-intensive work, and low work efficiency, the present invention provides an AGV trolley control method.
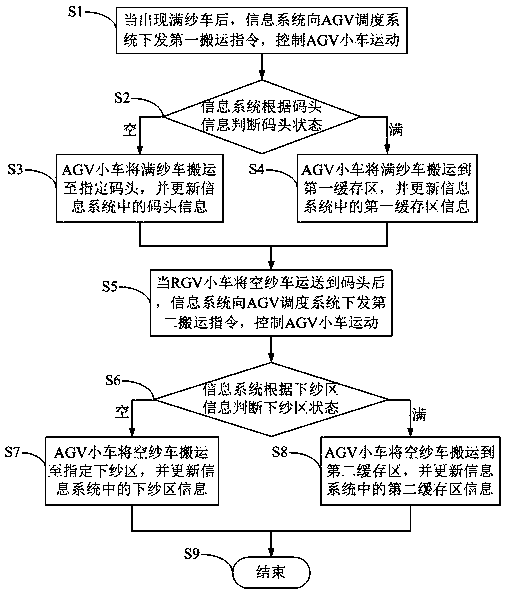
[0037] Such as figure 1 As shown, the present invention provides a kind of AGV trolley control method, comprises the following steps:
[0038] S1. When a full yarn car appears, the information system sends the first handling instruction to the AGV dispatching system to control the movement of the AGV trolley; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More