

Mechanical arm of medical diagnosis and treatment surgery robot
A surgical robot and robotic arm technology, applied in the field of medical surgical robots, can solve the problems of inability to meet the accuracy requirements of diagnosis and treatment operations, insufficient number of fixed fixture installation structures, unfavorable surgical operations for medical personnel, etc., to avoid workload and ensure safety and stability , Improve the effect of using the effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
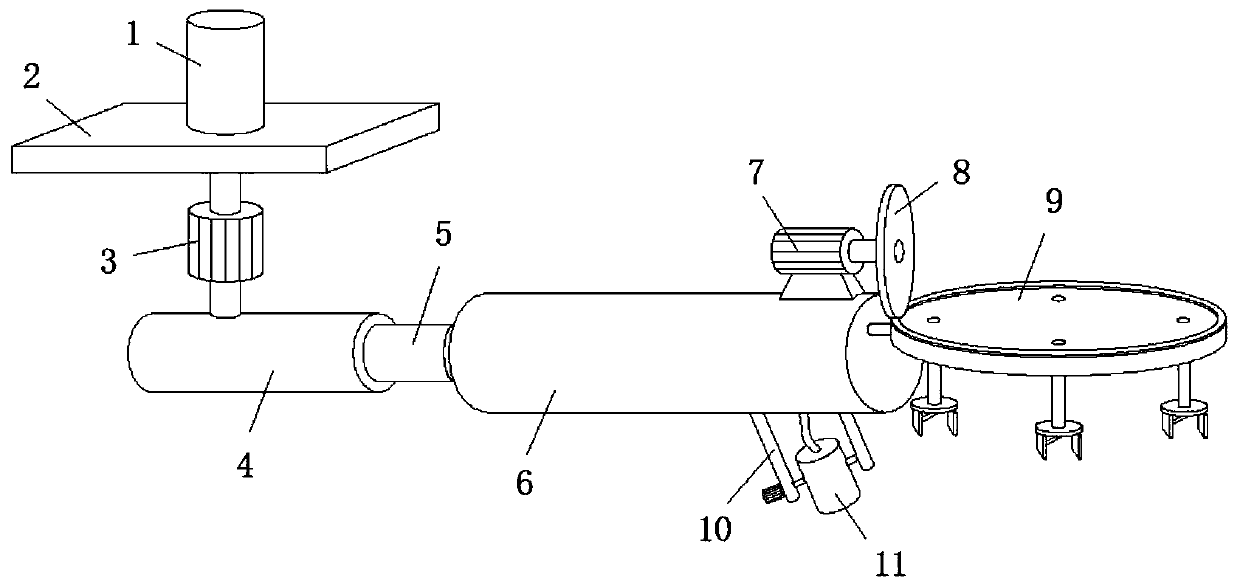
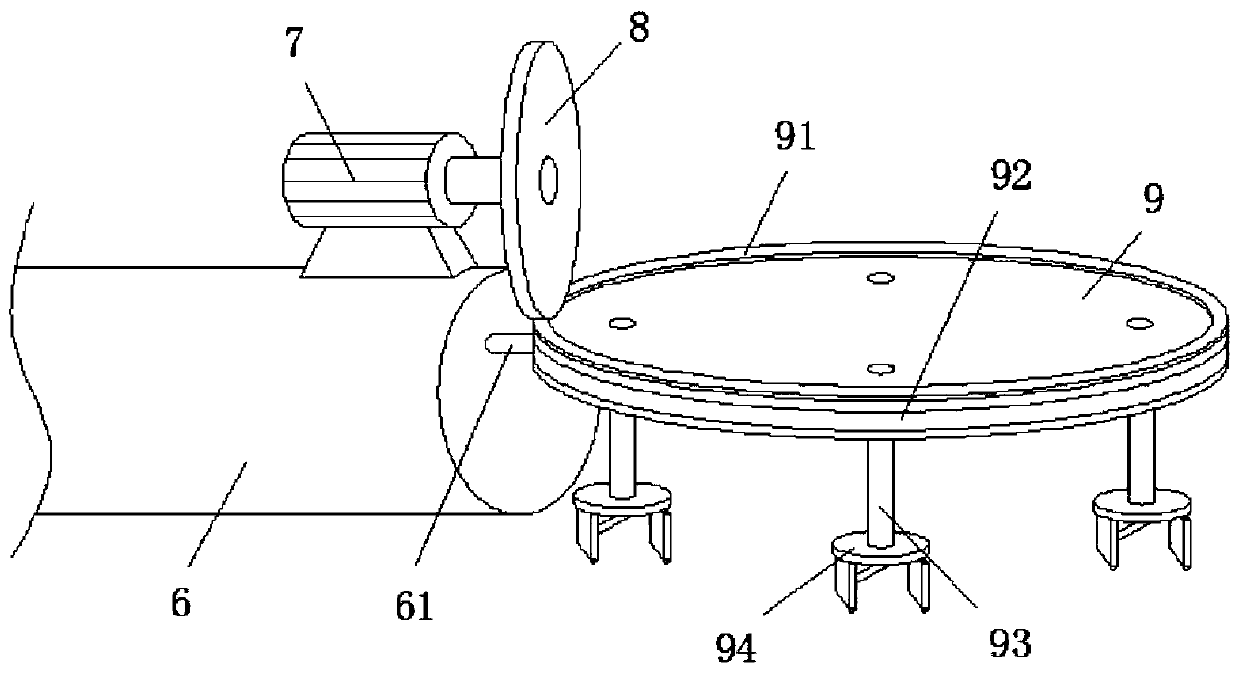
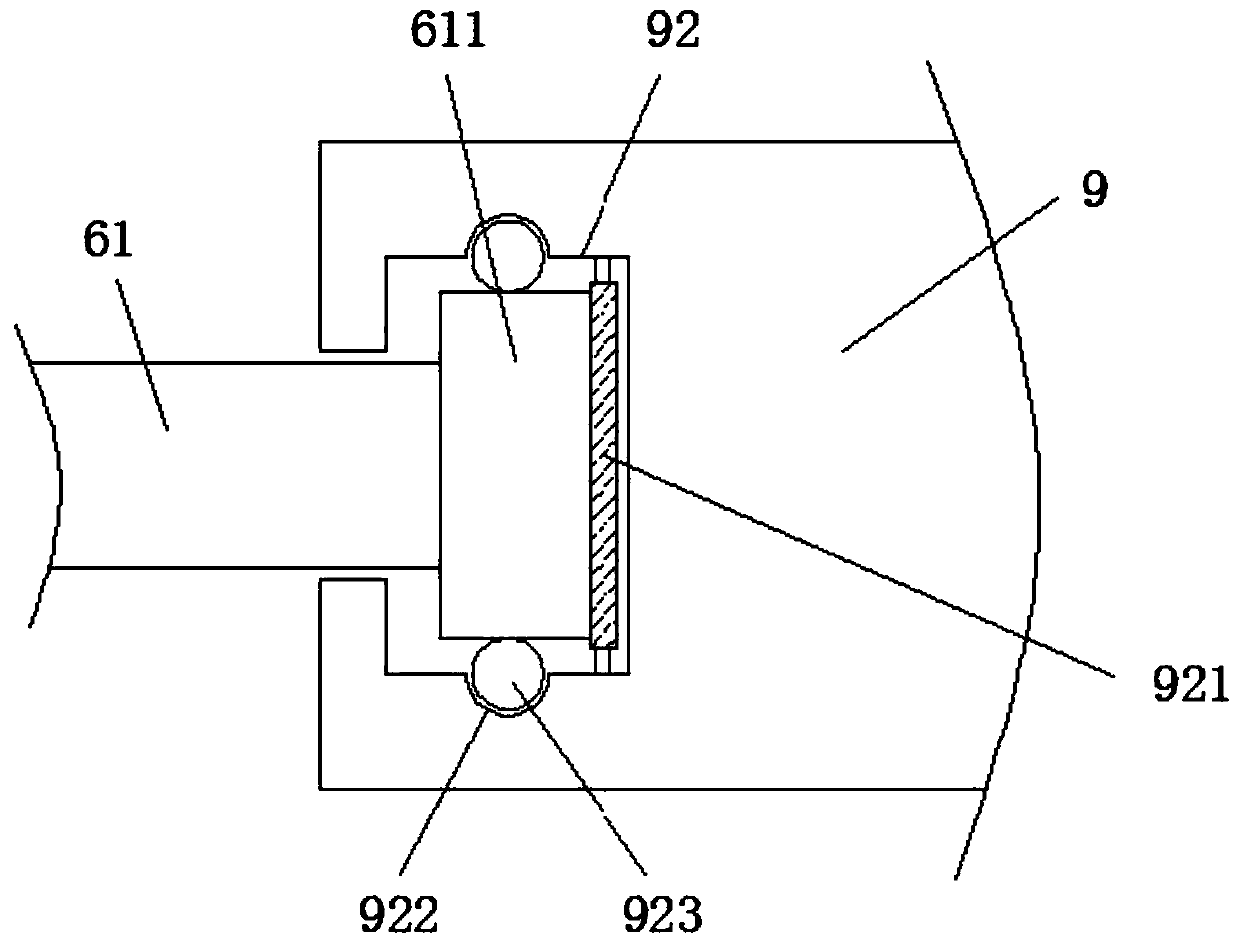
[0052] Such as figure 1 , figure 2 with image 3 As shown, a mechanical arm of a medical diagnosis and treatment surgical robot includes: a fixed plate 2, a primary arm 4, a secondary arm 6 and a rotary disk 9;
[0053] The upper surface of the fixed plate 2 is provided with a first electric push rod 1, and a first servo motor 3 is connected below the first electric push rod 1, and the first servo motor 3 is connected to the primary arm 4 through a coupling;
[0054] The outer wall of the primary arm 4 is provided with a second servo motor 5, and the second servo motor 5 is connected to the secondary arm 6 through a coupling;
[0055] Also includes a third servo ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More