

Path tracking and stable controlling method for intelligent automobile in limiting condition
A stable control method and extreme working condition technology, applied in the field of intelligent vehicle control, can solve the problem that the controller cannot meet the requirements of trajectory tracking and stability, etc., to improve the accuracy of path tracking, optimize the front wheel angle, and optimize the vehicle speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0009] The present invention will be further described below in conjunction with accompanying drawing.
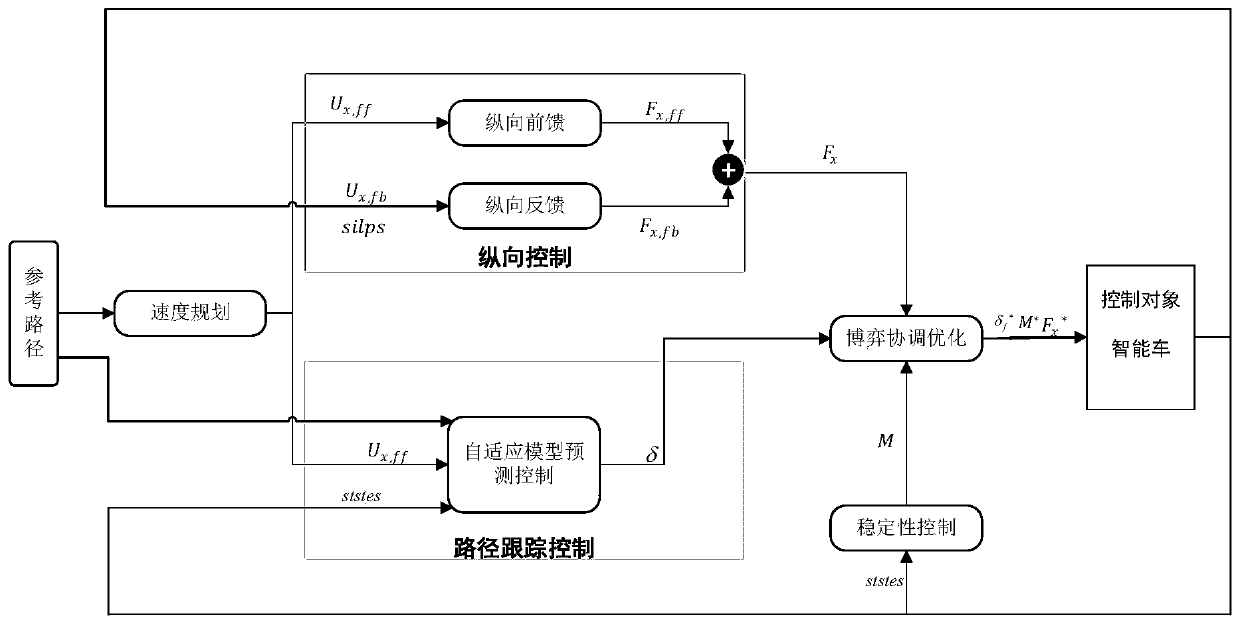
[0010] vertical control
[0011] The longitudinal controller consists of feedforward control and feedback control. Feed-forward control determines acceleration and braking based on acceleration, while feedback control adjusts vehicle speed based on parameters such as slip rate and side slip angle.
[0012] The desired longitudinal acceleration a along the path is calculated by x , U x is the longitudinal vehicle speed, therefore, according to Newton's second law, the feedforward longitudinal force F along the path x,ff It can be calculated that:
[0013]
[0014] f xff = ma x
[0015] Feedback longitudinal control obtains feedback longitudinal input tire slip rate s by controlling the relationship between slip rate and side slip angle:
[0016]
[0017] where V ω =rω is the wheel speed, ω is the rolling angular velocity of the wheel; r is the radius of the wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More