

High-precision map drawing method acting in agricultural field
A map drawing and field technology, applied in the field of map drawing, can solve problems such as failure of detection of agricultural machinery failures, and achieve the effect of optimal work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
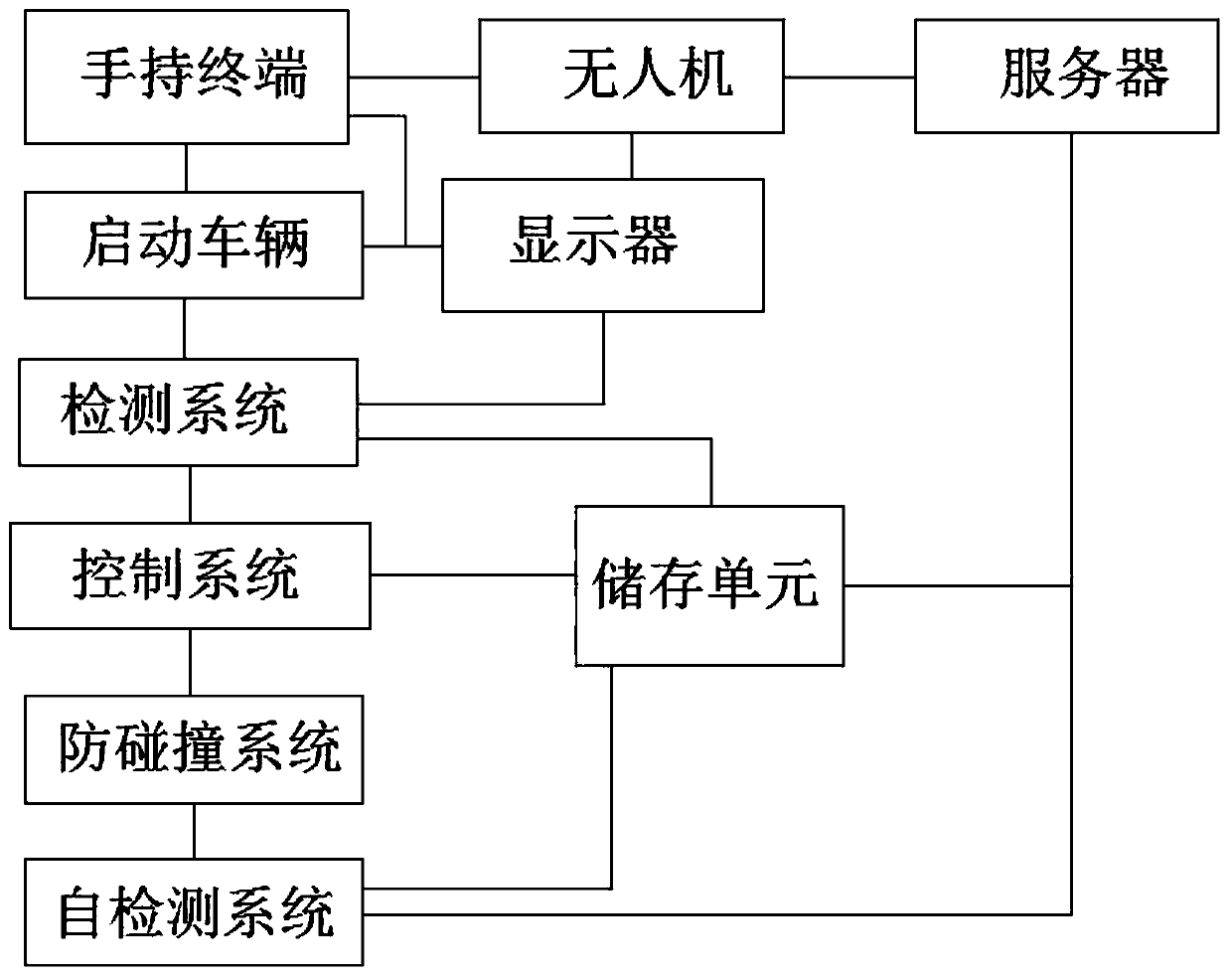
[0029] see Figure 1-3 , a high-precision map drawing method acting in the agricultural field, comprising the following steps:
[0030] Step 1: Start the handheld terminal and control the drone to measure the target area;
[0031] Step 2: Start the agricultural machinery vehicle, the detection system obtains the location information of the vehicle, and obtains the driving path of the vehicle according to the measurement data of the drone, and transmits the path data to the display;
[0032] Step 3: The control system receives and executes the path planning data, and controls the agricultural machinery vehicle to drive according to the path planning data;
[0033] Step 4: The anti-collision system is turned on, so that the vehicle automatically avoids obstacles;
[0034] Step 5: The self-inspection system detects vehicle faults, and the detection data is uploaded to the storage unit and server at any time.
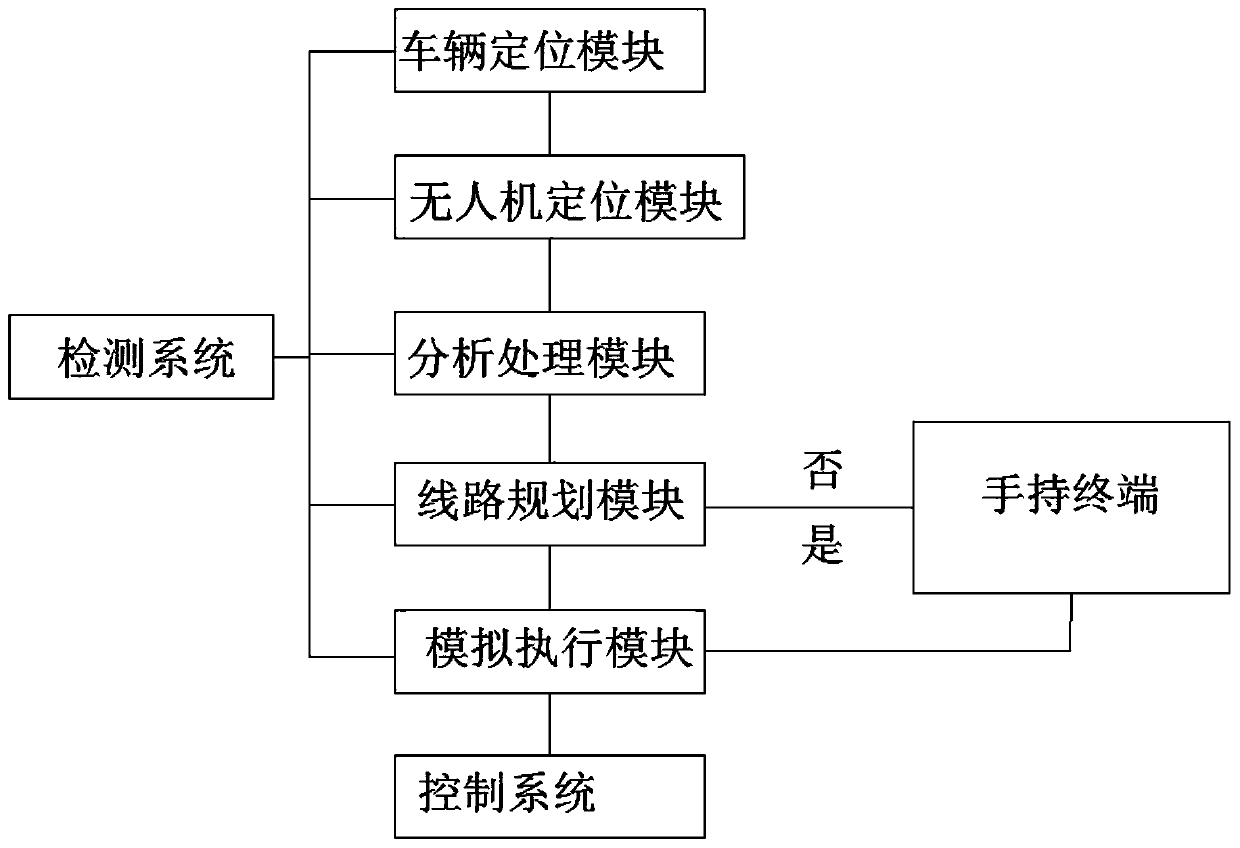
[0035]The detection system includes vehicle positioning module, UAV...
Embodiment 2
[0037] see Figure 1-3 , a high-precision map drawing method acting in the agricultural field, comprising the following steps:
[0038] Step 1: Start the handheld terminal and control the drone to measure the target area;
[0039] Step 2: Start the agricultural machinery vehicle, the detection system obtains the location information of the vehicle, and obtains the driving path of the vehicle according to the measurement data of the drone, and transmits the path data to the display;
[0040] Step 3: The control system receives and executes the path planning data, and controls the agricultural machinery vehicle to drive according to the path planning data;
[0041] Step 4: The anti-collision system is turned on, so that the vehicle automatically avoids obstacles;
[0042] Step 5: The self-inspection system detects vehicle faults, and the detection data is uploaded to the storage unit and server at any time.
[0043] The detection system includes vehicle positioning module, UA...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More