Bionic flexible claw thorn array foot with adjustable and controllable adhesion state
An adhesion state and array technology, applied in the field of bionic and flexible claw spine array foot, can solve the problems of broken claw spine falling off, uneven force on claw spine, active regulation, etc., to reduce motion friction, increase adaptability, avoid The effect of fracture damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the embodiments of the present invention. Obviously, the described embodiments are part of the present invention Examples, not all examples.
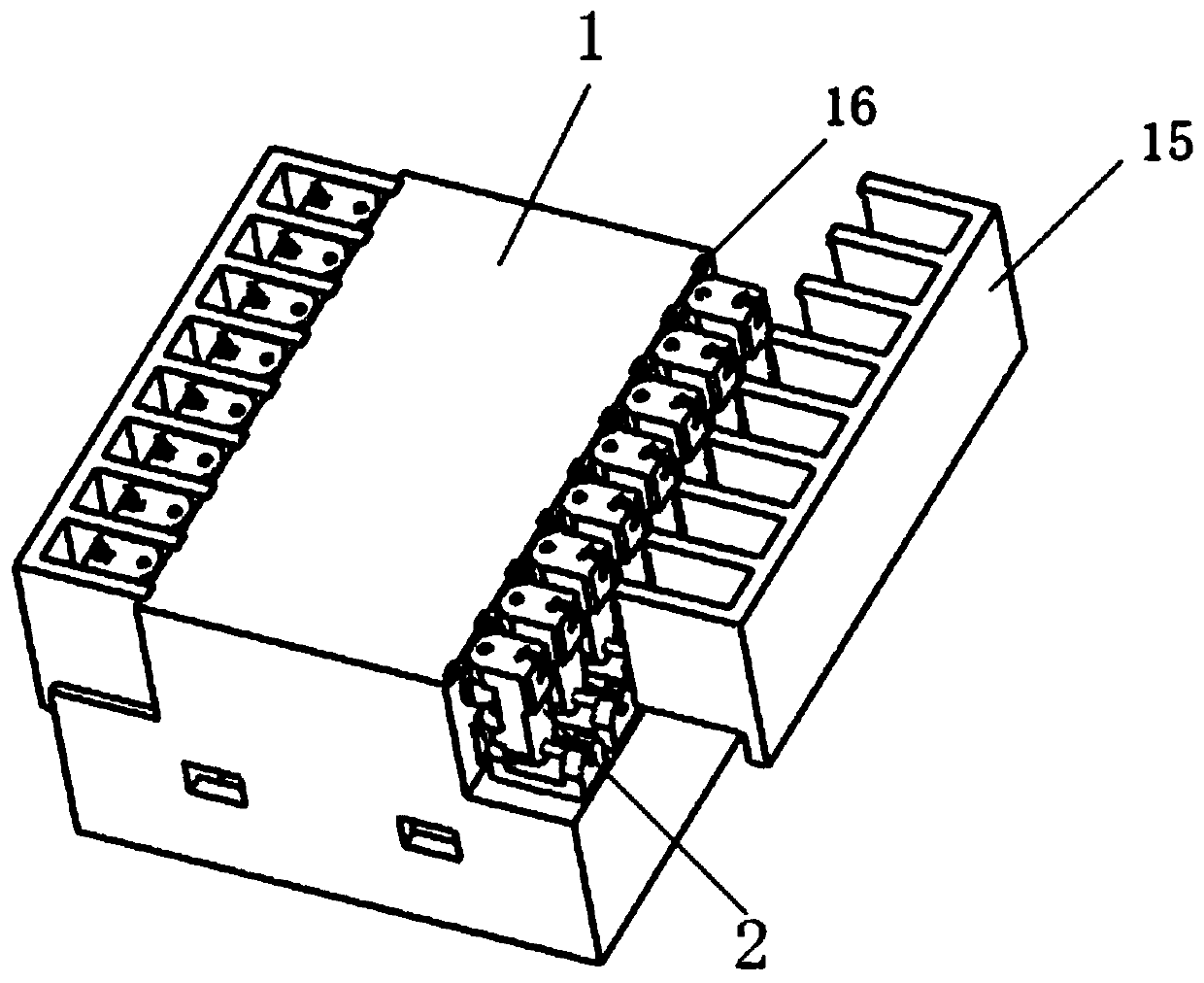
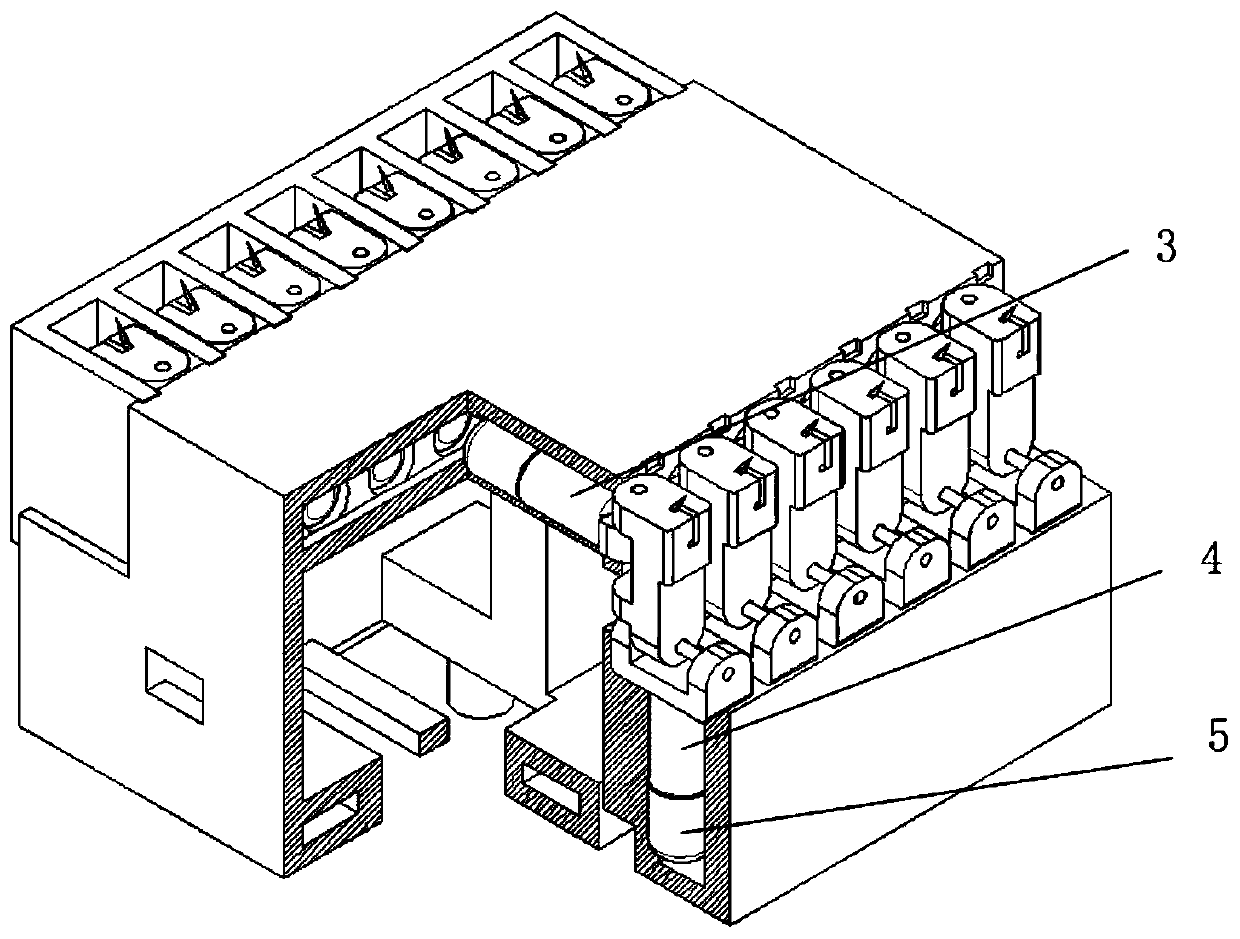
[0035] The invention discloses a bionic flexible claw spine array foot whose adhesion state can be adjusted, such as Figure 1~2 It includes a claw foot base 1, and a claw unit is connected to the claw foot base 1. The claw unit includes a tangential piston rod 3, a normal piston rod 4 and a claw seat 2, and has two freedom of movement;
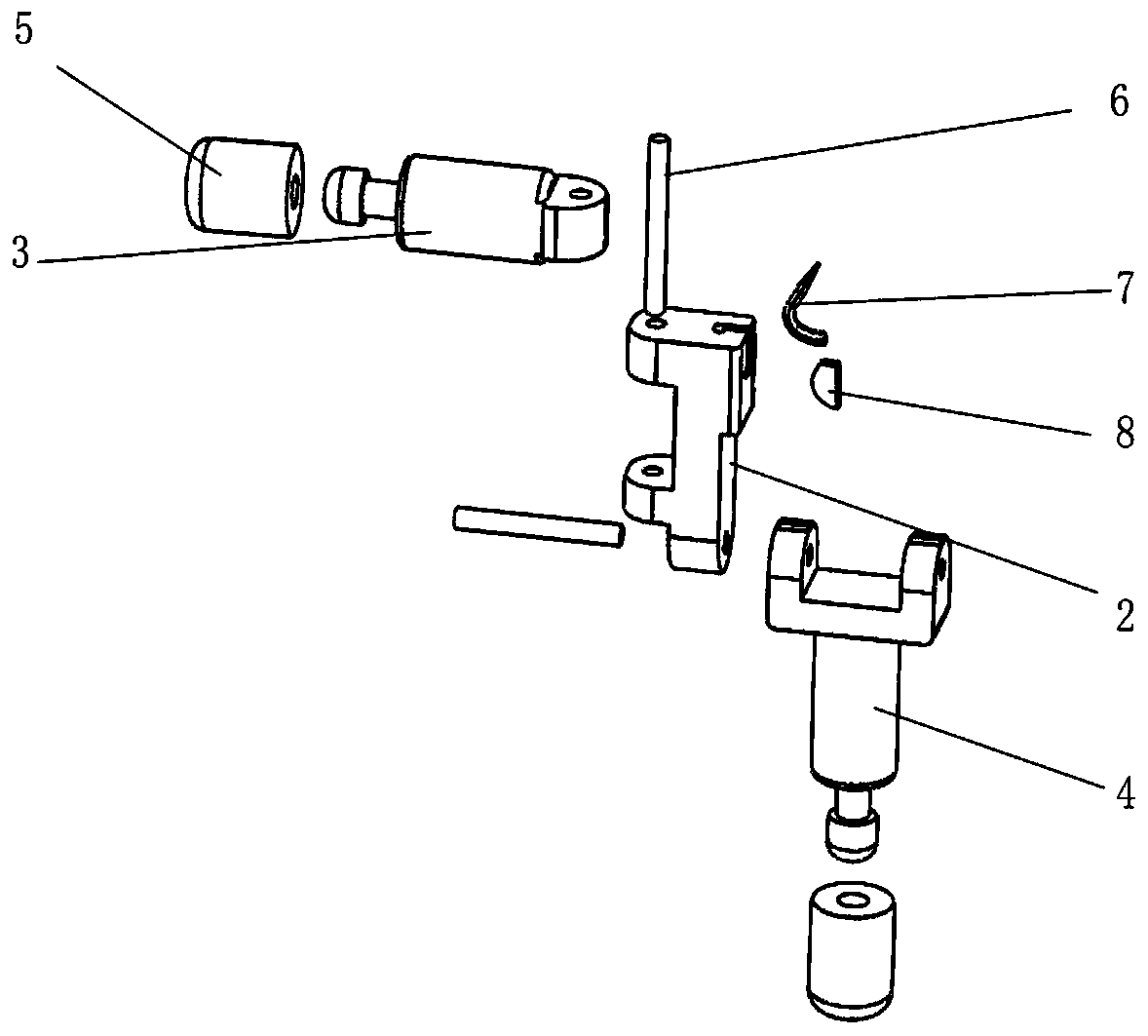
[0036] Such as Figure 3-5 As shown, the claw thorn 7 is fixed on the claw thorn seat 2, the tangential piston rod 3 cooperates with the tangential piston hole 9 on the claw thorn foot base 1, and the normal direction piston rod 4 and the normal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com