

Indoor and outdoor integrated positioning and navigation method and system
A positioning and navigation, indoor and outdoor technology, applied in the field of indoor and outdoor integrated positioning and navigation methods and systems thereof, can solve problems such as cumulative error, increased positioning error, and sensor error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
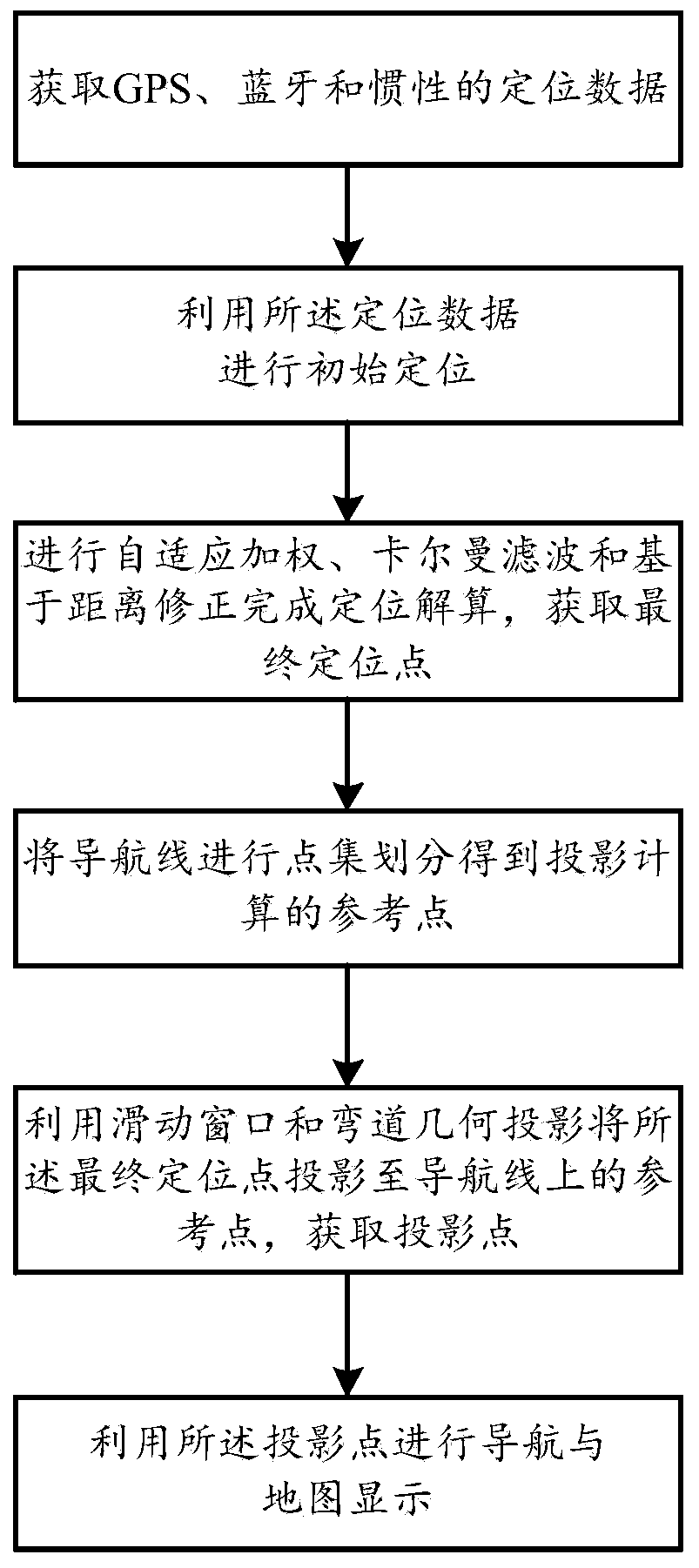
[0075] An indoor and outdoor integrated positioning and navigation method, comprising the following steps:
[0076] Step 1: After obtaining GPS, Bluetooth and inertial positioning data, use the positioning data to perform initial positioning;
[0077] Step 2: The positioning data after the initial positioning is adaptively weighted, Kalman filter and based on distance correction to complete the positioning calculation, and obtain the final positioning point;
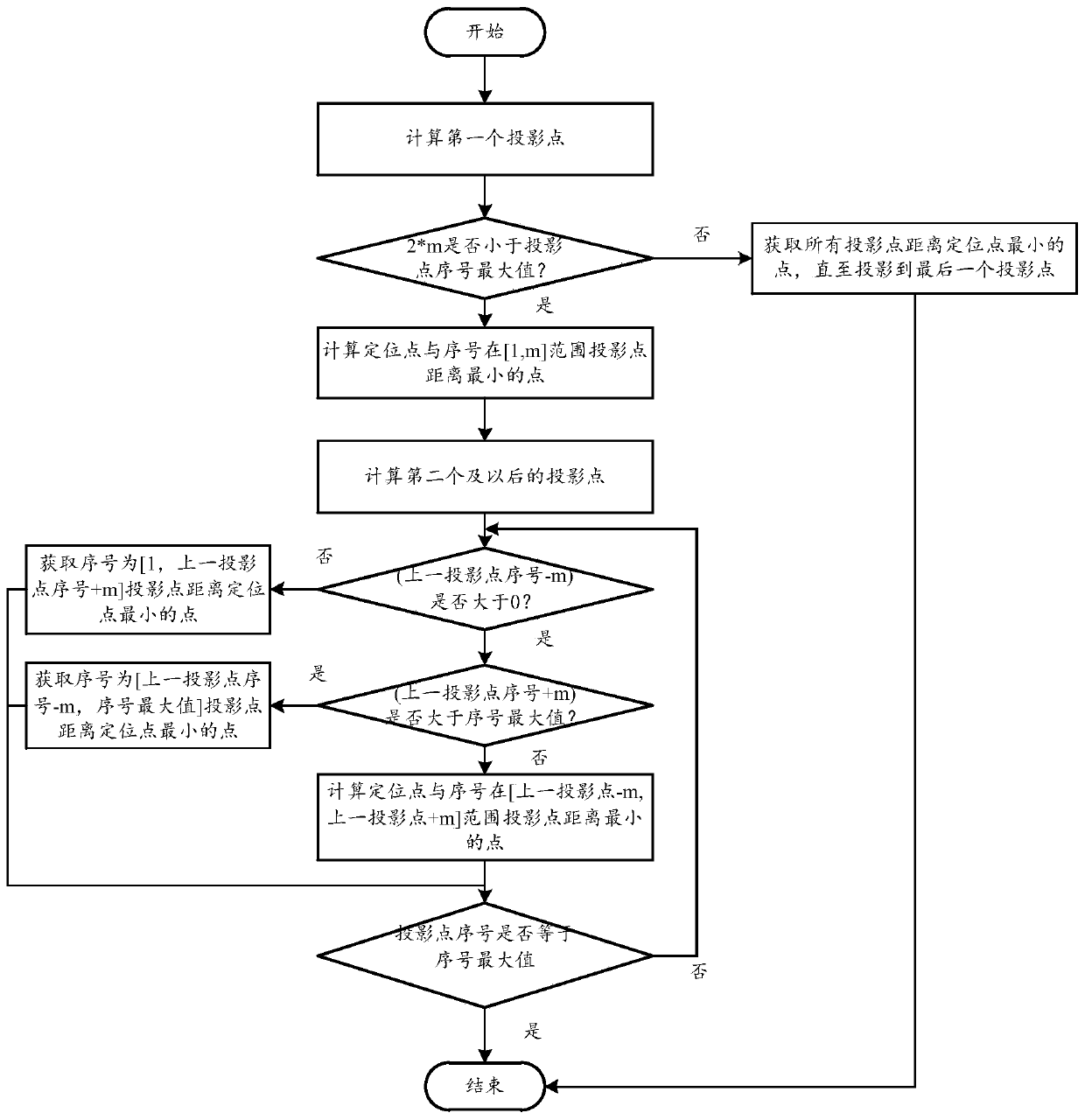
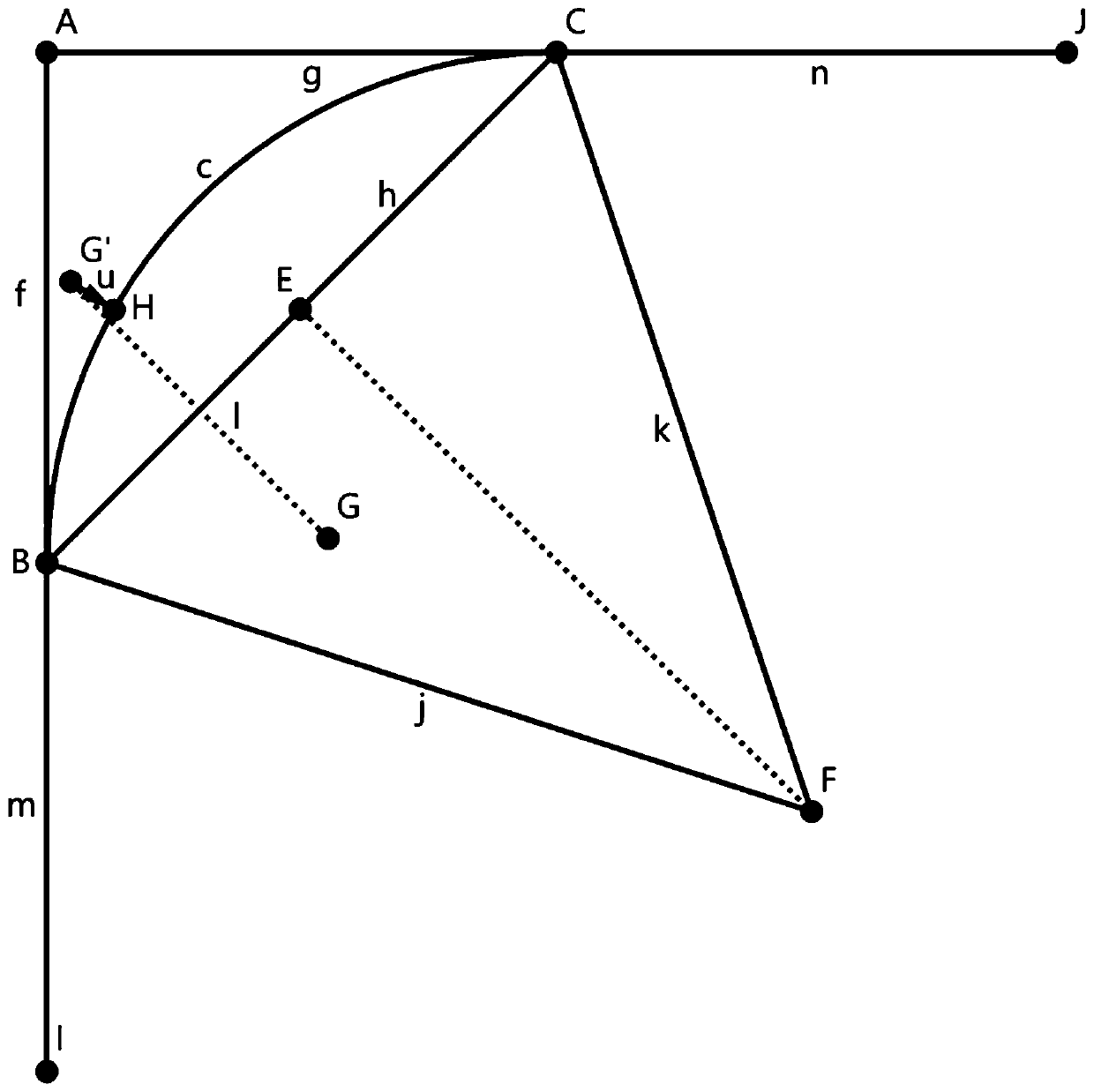
[0078] Step 3: divide the navigation line into point sets to obtain reference points for projection calculation, and use the sliding window and curve geometric projection to project the final positioning point to the reference point on the navigation line to obtain the projection point;
[0079] Step 4: Use the projected points for navigation and map display.
[0080] Described step 1 comprises the following steps:
[0081] Step 1.1: Obtain GPS, Bluetooth and inertial positioning data, the GPS positioning data includes...
Embodiment 2
[0166] Based on the method of Embodiment 1, a system is provided, the system includes a processor, a memory, and a computer program stored in the memory and operable on the processor "Step 1: Acquiring GPS, Bluetooth and inertial positioning data Finally, use the positioning data for initial positioning; step 2: perform adaptive weighting, Kalman filtering, and distance correction based on the positioning data after the initial positioning to complete positioning calculations to obtain the final positioning point; step 3: point the navigation line The reference point for projection calculation is obtained by set division, and the final positioning point is projected to the reference point on the navigation line by using the sliding window and curve geometric projection to obtain the projection point; step 4: use the projection point for navigation and map display. ”, the computer program can be divided into one or more modules / units, and the one or more modules / units are stored...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More