

Geometry target positioning method based on multi-layer depth and color visual information
A color vision and target positioning technology, applied in the field of computer vision, can solve problems such as the inability to effectively identify objects without texture features, regular geometric objects, etc., to achieve the effect of strong recognition effect, small amount of calculation, and real-time recognition.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with accompanying drawing and example.
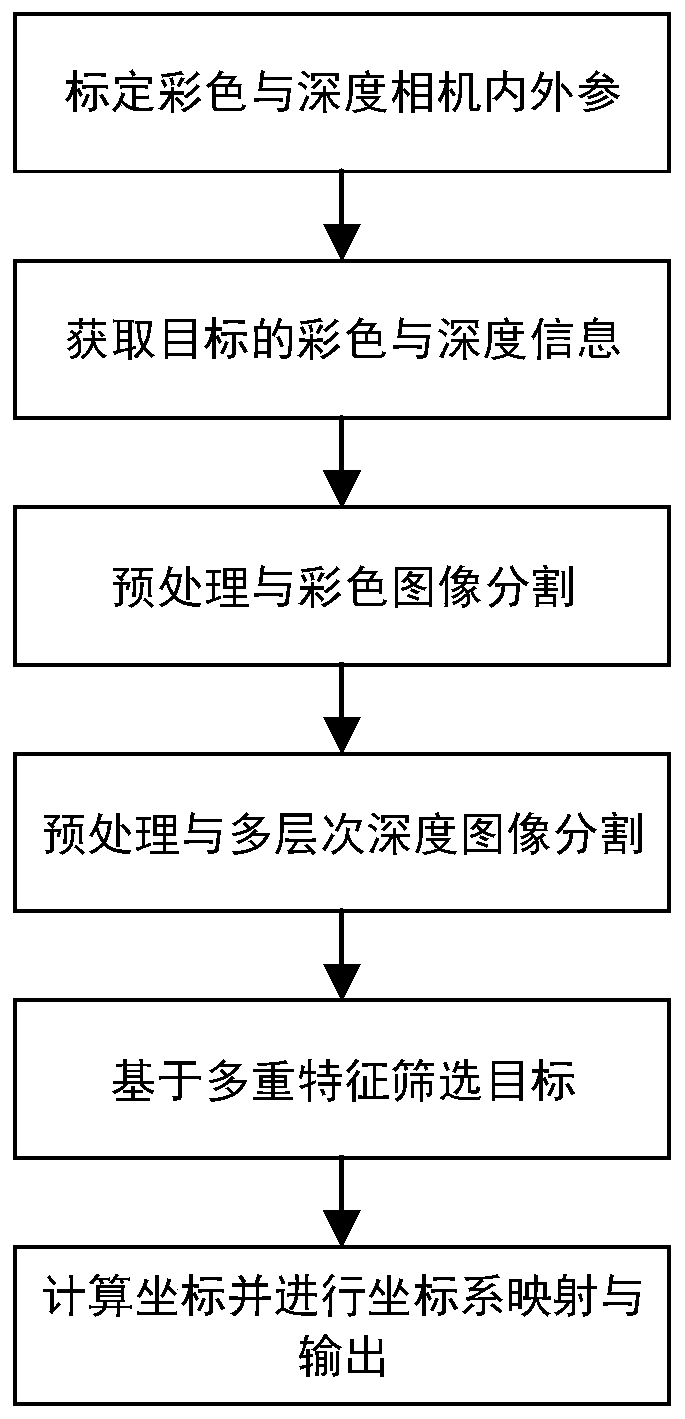
[0039] The present invention is based on a geometric object positioning method based on multi-layer depth and color vision information, comprising the following steps:
[0040] (1) Correct the internal parameters of the color camera and the depth camera, the distortion coefficient, and the transformation matrix relationship between the two camera images of the depth camera and the color camera. In this way, the two-pixel coordinate system - the camera coordinate system - the world coordinate system is established to be connected with each other to prepare for the subsequent positioning. The two internal reference matrices and the transformation matrix are described by formula (1) (2),
[0041](2) The camera is arranged parallel to the detection workbench. The distance between the workbench tabletop and the visual sensor should be controlled within the depth vis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More