

Electromagnetically driven parallel clamping device and control system thereof
A technology of electromagnetic drive and electromagnetic drive, which is applied in the field of manipulators, can solve problems such as reducing the use effect, large installation space, and lagging response speed, and achieve the effects of prolonging service life, improving safety, and increasing clamping force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
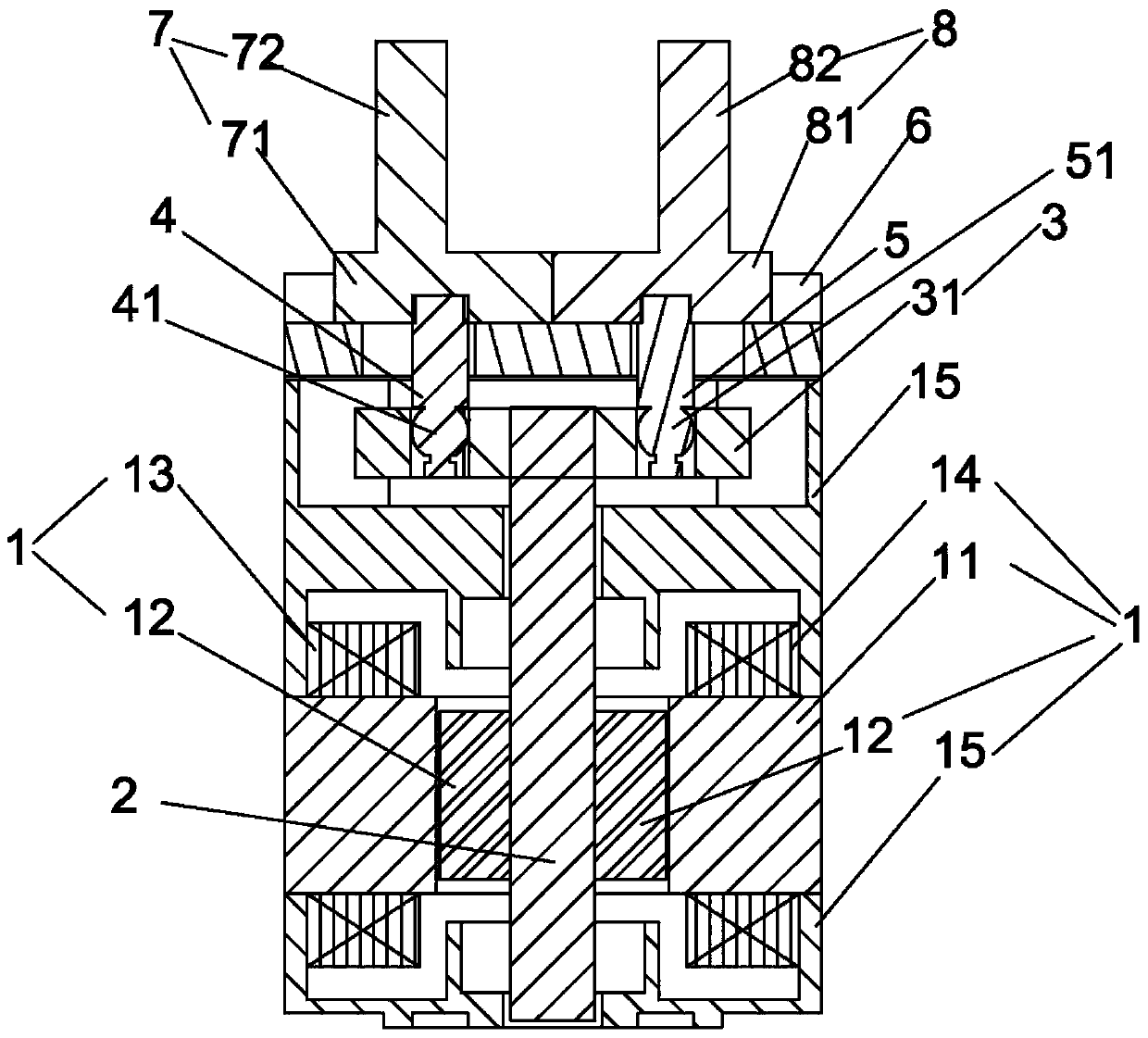
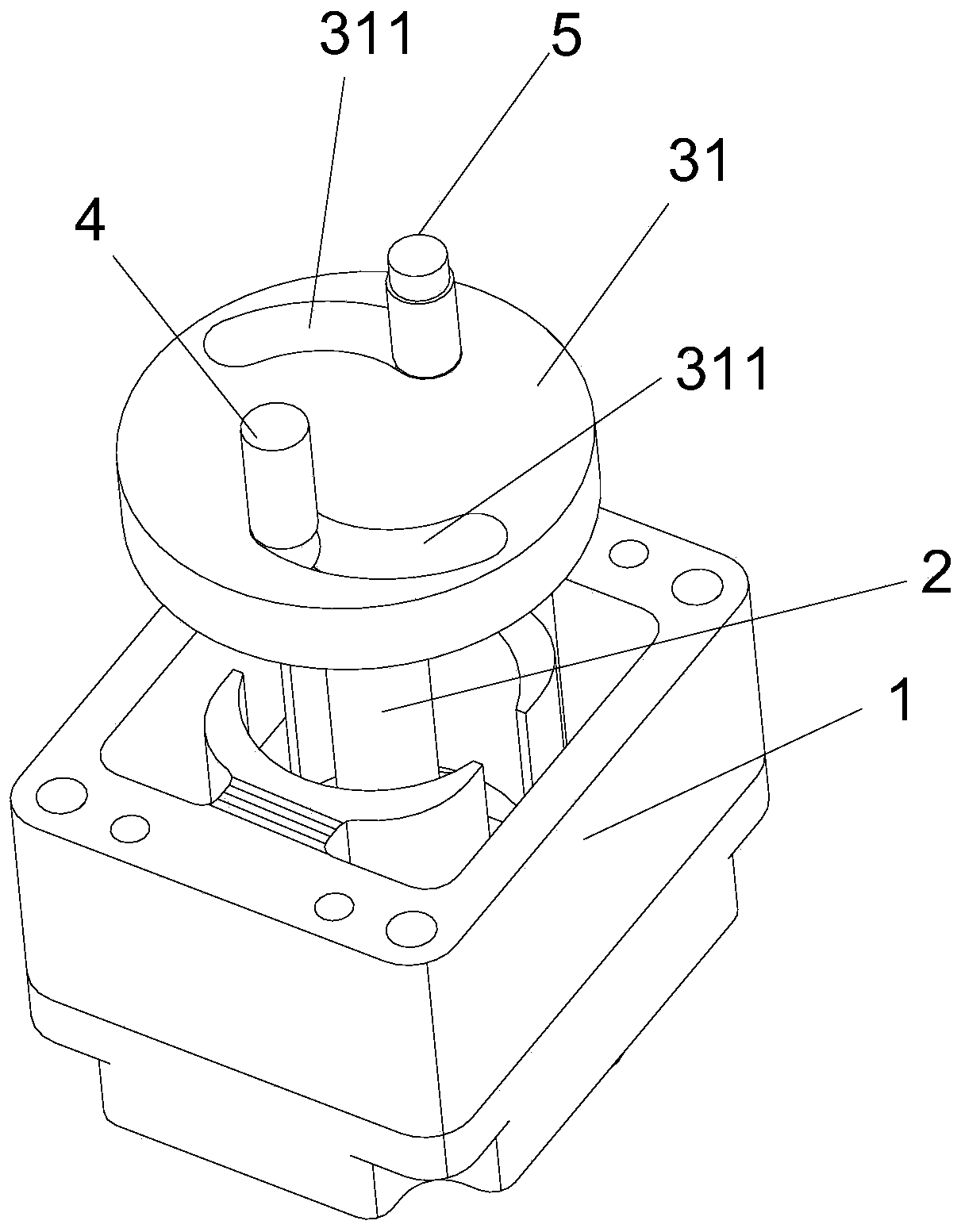
[0054] Such as figure 1 , figure 2 , Figure 4 , Figure 5 As shown, an electromagnetically driven parallel clamping device includes: a shaft rotating electromagnetic driver 1, a rotating shaft 2, a double transmission shaft retracting mechanism 3, a first transmission shaft 4, a second transmission shaft 5, a linear guide rail 6, a first clamping finger 7 and second clamping finger 8;
[0055] One end of the rotating shaft 2 is installed in the shaft rotating electromagnetic driver 1; the other end of the rotating shaft 2 extends out of the shaft rotating electromagnetic driver 1; the double transmission shaft retracting mechanism 3 is arranged on the rotating shaft 2 above, the rotating shaft 2 is fixedly connected to the middle part of the bottom surface of the double transmission shaft retracting mechanism 3; one end of the first transmission shaft 4 is connected to one side of the double transmission shaft retracting mechanism 3 and is arranged on the Above one side ...
Embodiment 2
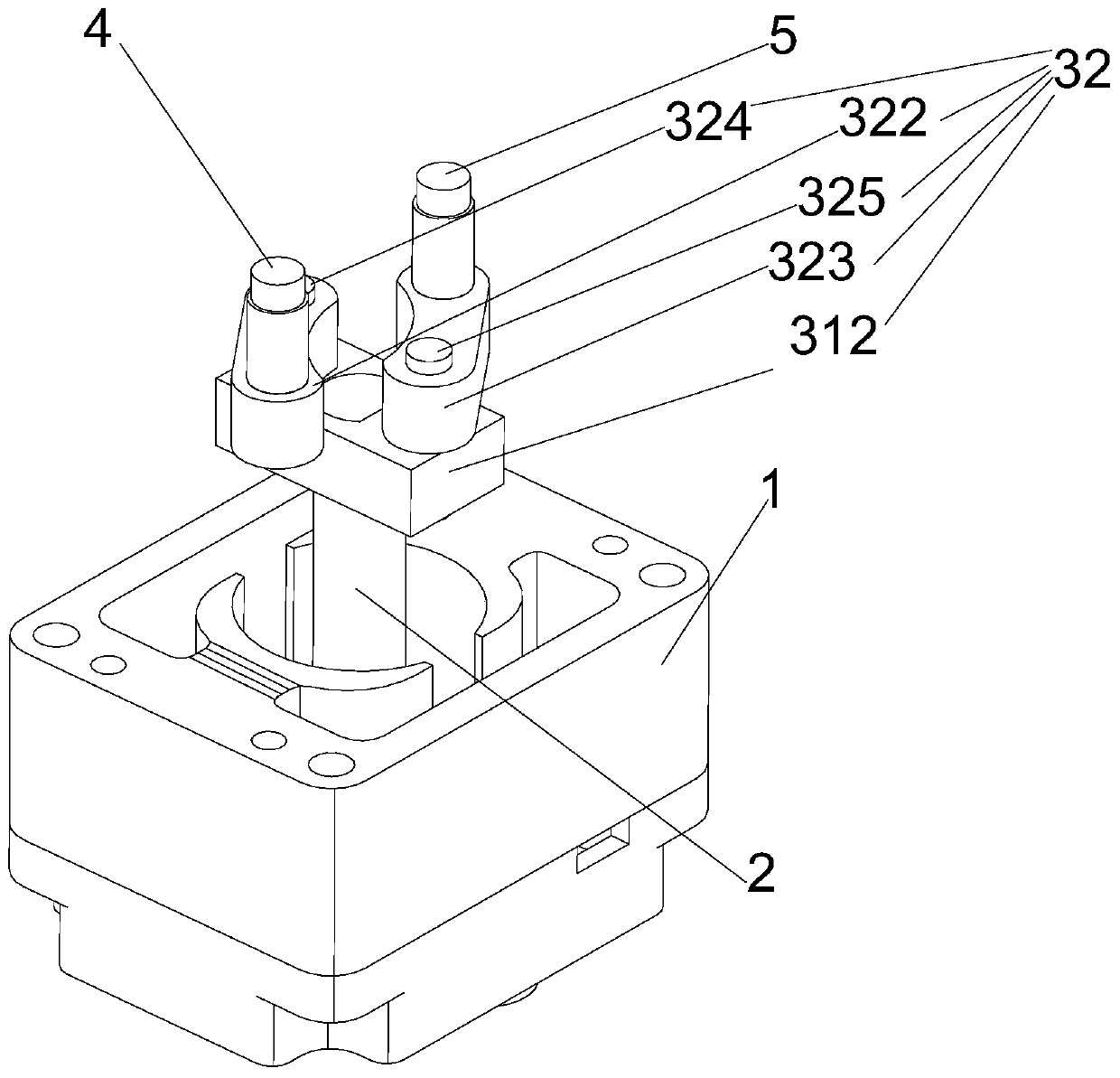
[0082] Such as image 3 , Figure 4 , Figure 5 As shown, an electromagnetically driven parallel clamping device includes: a shaft rotating electromagnetic driver 1, a rotating shaft 2, a double transmission shaft retracting mechanism 3, a first transmission shaft 4, a second transmission shaft 5, a linear guide rail 6, a first clamping finger 7 and second clamping finger 8;
[0083]One end of the rotating shaft 2 is installed in the shaft rotating electromagnetic driver 1; the other end of the rotating shaft 2 extends out of the shaft rotating electromagnetic driver 1; the double transmission shaft retracting mechanism 3 is arranged on the rotating shaft 2 above, the rotating shaft 2 is fixedly connected to the middle part of the bottom surface of the double transmission shaft retracting mechanism 3; one end of the first transmission shaft 4 is connected to one side of the double transmission shaft retracting mechanism 3 and is arranged on the Above one side of the double ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More