

A method for active control of vehicle turning
An active control and vehicle technology, applied to vehicle components, steering mechanisms, transportation and packaging, etc., can solve problems such as obstacles or pedestrian collisions, misjudgment, and invisibility, and achieve precise and simple methods, collision avoidance, and timely control moving effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
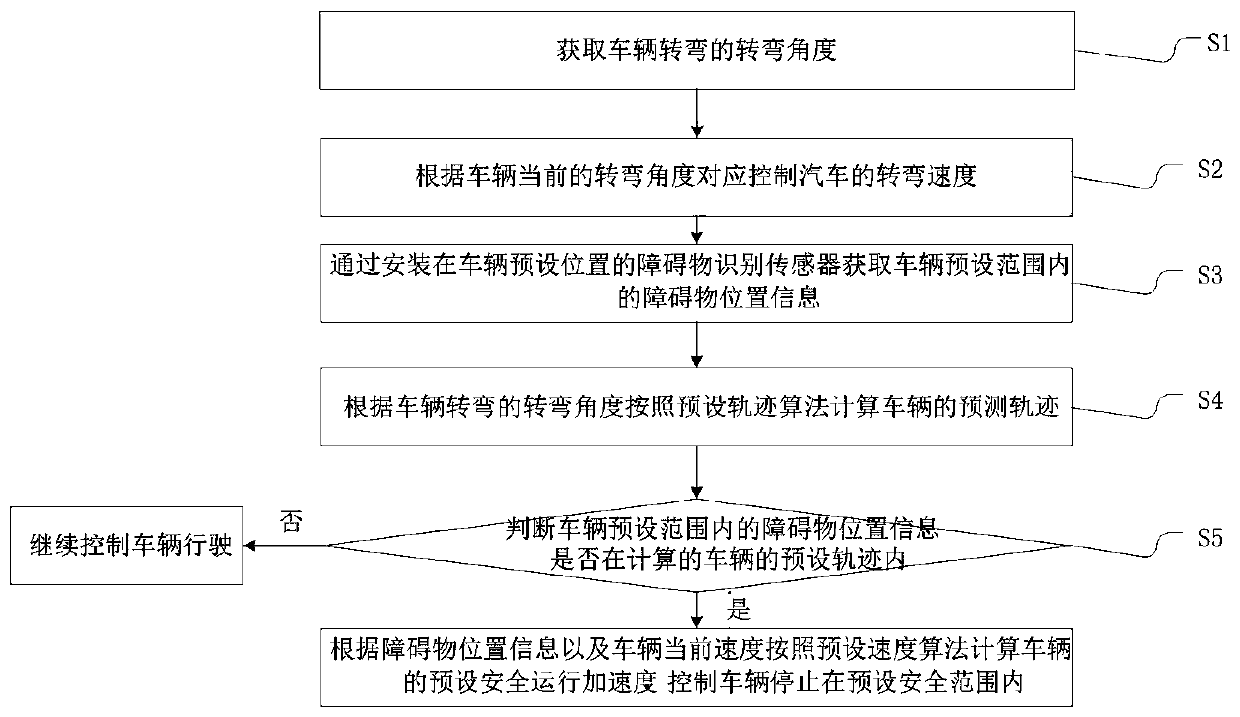
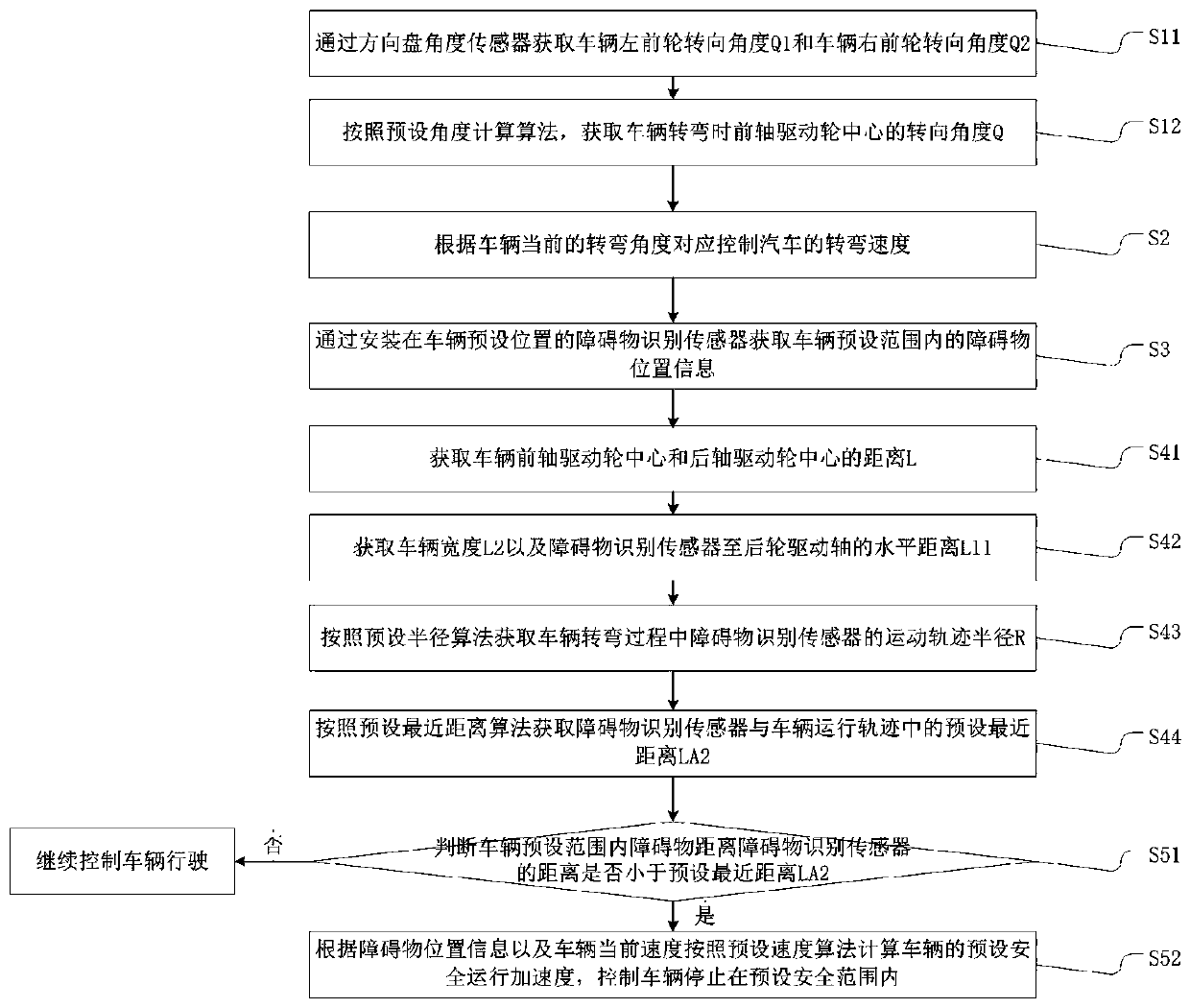
[0054] This embodiment provides a method for active control of vehicle turning, such as Figure 1 to Figure 6 As shown, the method includes the steps of:
[0055] S1: Obtain the turning angle of the vehicle turning;
[0056] S2: Correspondingly control the turning speed of the vehicle according to the current turning angle of the vehicle;
[0057] S3: Obtain the obstacle position information within the preset range of the vehicle through the obstacle recognition sensor 30 installed at the preset position of the vehicle;
[0058] S4: Calculate the predicted trajectory of the vehicle according to the preset trajectory algorithm according to the turning angle of the vehicle;
[0059]S5: Determine whether the obstacle position information within the preset range of the vehicle is within the calculated predicted trajectory of the vehicle; if so, calculate the preset safe running acceleration of the vehicle according to the preset speed algorithm according to the obstacle position...
Embodiment 2
[0104] This embodiment provides a system for active control of vehicle turning, such as Figure 5As shown, the system used for the active control of vehicle turning includes:
[0105] The steering wheel angle sensor 10 is used to obtain the rotation angle of the steering wheel;
[0106] The turning speed control module 20 is used for correspondingly controlling the turning speed of the vehicle according to the driving speed of the current vehicle and the turning angle;
[0107] Obstacle recognition sensor 30, used to obtain obstacle position information within the preset range of the vehicle;
[0108] The vehicle track calculation module 40 is used to calculate and obtain the steering angle of the left front wheel and the right front wheel of the vehicle according to the rotation angle of the obtained steering wheel, and obtain the steering angle of the current vehicle according to the obtained steering angle of the left front wheel and the right front wheel of the vehicle. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More