

Unmanned aerial vehicle formation consistency control method, system and device under time-varying channel based on topological optimization and storage medium
A topology optimization and time-varying channel technology, applied in the field of UAVs, can solve the problems that it is difficult to adapt to the actual needs of coordinated attacks by UAVs, the difficulty of constructing potential field functions, and the unsatisfactory satisfaction, etc., to ensure control accuracy and good performance. Technical effect, effect of improved topology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] One of the main challenges faced by multi-UAV formation control in low-altitude and highly dynamic environments is the time-varying connectivity in multipath fading channels, leading to low precision and uncertain convergence times of control laws. In order to solve this problem, the present invention discloses a UAV formation consistency control method based on topology optimization under a time-varying channel, and performs distributed consistency control through two topology optimization ideas of formation reconstruction and power allocation to ensure Control accuracy within a finite convergence time. In particular, the second eigenvalue of the Laplacian matrix is incorporated into the objective function of topology optimization as an index for evaluating and measuring topology connectivity.
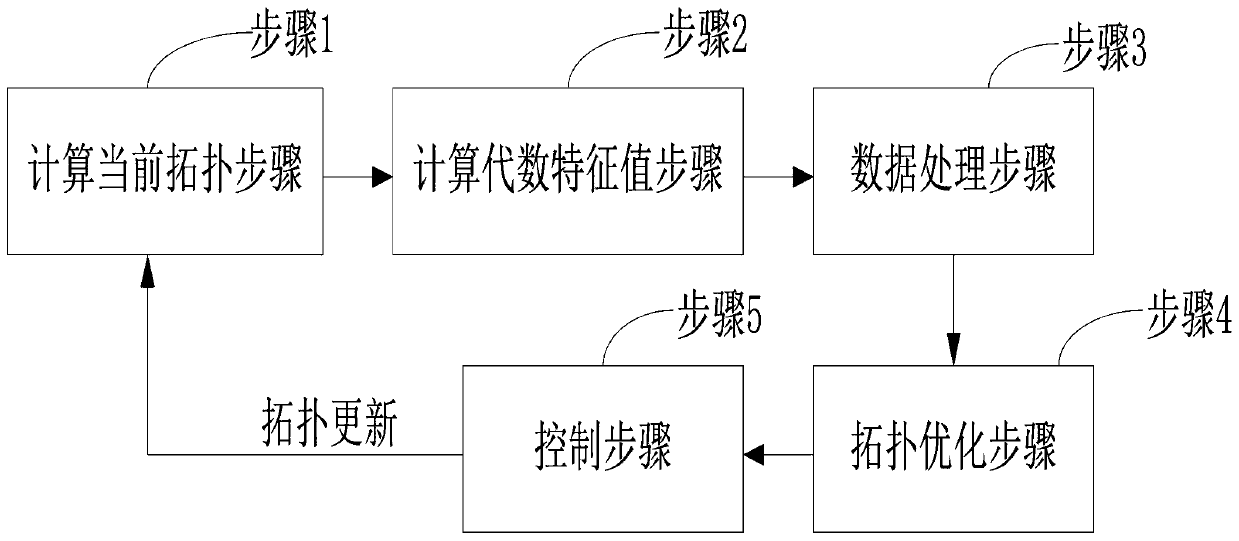
[0059] Such as figure 1 As shown, the present invention discloses a UAV formation consistency control method based on topology optimization under a time-varying channel, inc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More