

A Method of Obstacle Avoidance Based on Probing Perception of Manipulator
A robotic arm and obstacle avoidance technology, applied in the field of industrial robot path planning, can solve problems such as unfavorable automated production, and achieve the effect of improving the scope of application and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0043] The present invention is verified below with a specific embodiment, the specific embodiment selects the UR robotic arm as the object, but the implementation object is not limited thereto.
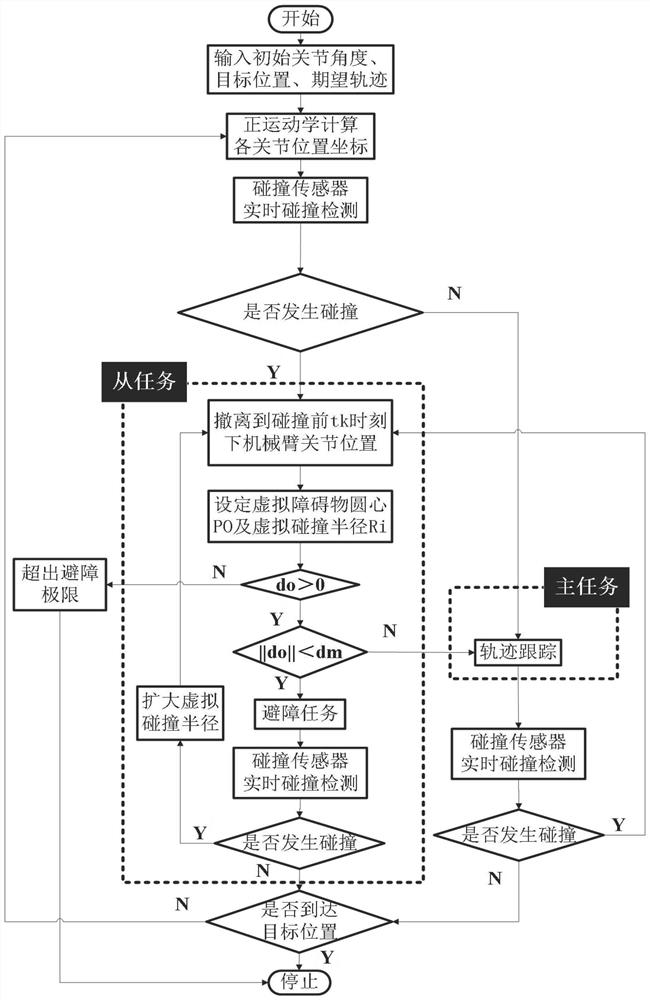
[0044] Step 1: Input initial joint angle, target position, desired trajectory;
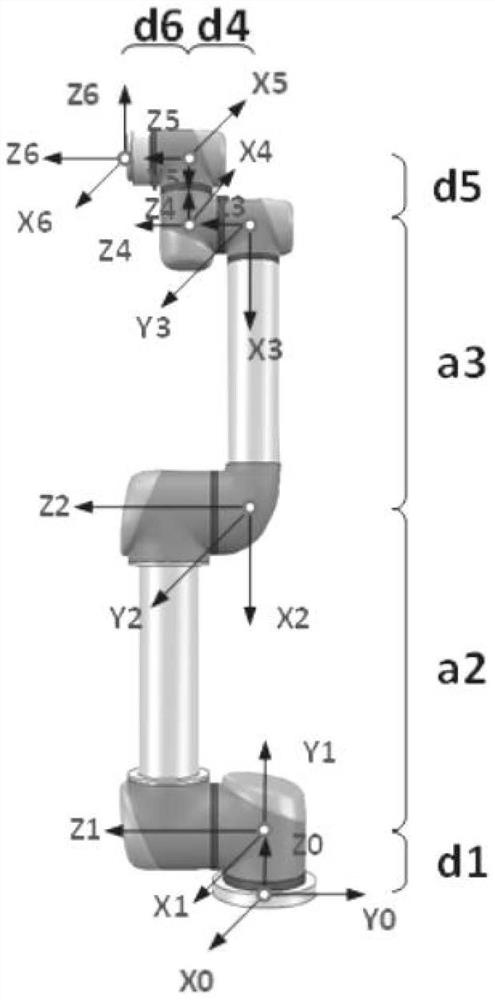
[0045] Step 2: Establish the kinematics model of the robotic arm. This paper takes the UR5 robot as the main research object. UR5 is a tandem robot with 6 rotating joints. In order to clearly show the pose relationship between the connecting rods of the robot, the D-H coordinate transformation method can be used for modeling. The D-H coordinate system of the robot is as follows: figure 1 shown. figure 1 In , the number of joints starts from 0, that is, joint 0 is the base. x i 、y i ,z i are the coordinate system of joint i in space.
[0046] The connecting rod parameters of industrial robots are divided into the geometric parameters of the connecting rod and the relationship parameters of the con...
Embodiment 2
[0074] The research object and process of this embodiment are the same as those of Embodiment 1, the difference is that this application adopts the external observer modeling method for collision detection,
[0075] Establish the current-based external force observer model of the manipulator. The joint output torque of the manipulator is determined by the motor torque τ m , external moment τ ext and the interference term ρ consists of three parts:
[0076] τ all =τ m +τ ext +ρ (7)
[0077] where the disturbance term ρ includes the friction torque τ f and the flexible element bears torque τ fle , the joint flexibility mainly comes from the harmonic reducer, which reduces the joint stiffness and has a flexible feature.
[0078] Given the expected trajectory, the estimated torque of the dynamic system is calculated according to the expected angle, expected angular velocity, and expected angular acceleration of each joint of the robot. τ m Indicates the torque required t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More