

Intelligent motion control method for motor servo system
A servo system and motion control technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as unknown function disturbance, ignoring measurement noise, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0125] The parameters of the motor servo system are: load moment of inertia m = 0.015kg m 2 ;Torque amplification factor k u =56.5N·m / V; the frictional force on the load The added unknown function perturbation Time-varying external disturbance d(t)=0.5sin(t)N m; the position command that the system expects to track is the curve x 1d (t)=0.2 sin(πt)[1-exp(-0.5t)]rad.
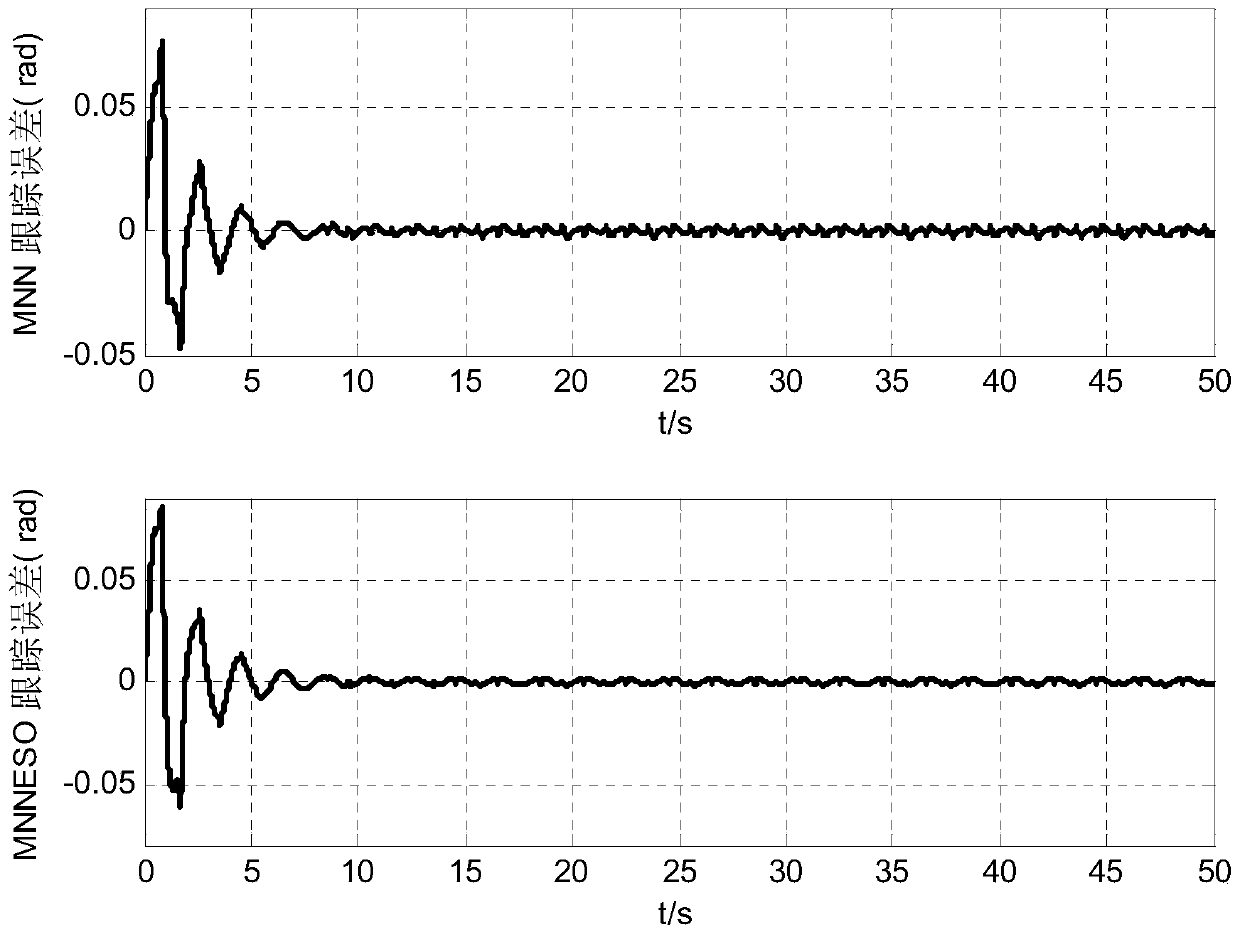
[0126] Compare the simulation results:
[0127] MNNESO: This means that the motor servo system intelligent motion controller designed in the present invention, its control parameter is selected as k 1 =5,k 2 = 5, ω 0 =60, M 1 = 2, M 2 =10, M=1, Y 1 =200diag{1,1,1,1,1,1,1,1,1,1,1}, Y 2 = 0.5diag{1,1,1,1,1,1,1,1,1,1,1}, gamma 1 =1.0×10 -5 , gamma 2 =1.0×10 -5 .
[0128] MNN: This means that the intelligent motion controller of the motor servo system designed by the present invention has no external disturbance feed-forward compensation function. The comparison controller is set up mainly to verify ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More