

Whole-course pose estimation method based on global map and multi-sensor information fusion
A global map and multi-sensor technology, applied in the field of navigation, can solve the problems of time synchronization sensitivity of filtering algorithm, unreliable and inaccurate results, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention proposes a whole-process pose estimation method based on global map and multi-sensor information fusion. The technical solution of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
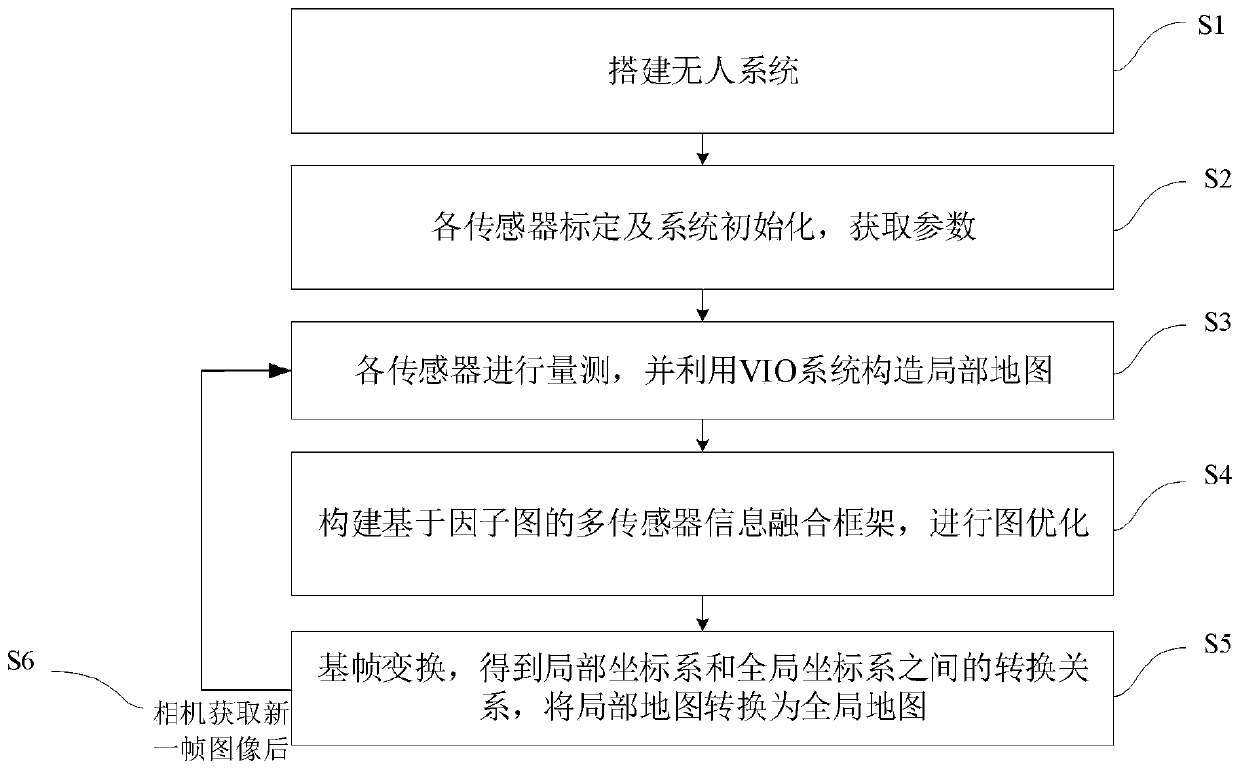
[0059] The present invention proposes a whole-process pose estimation method based on global map and multi-sensor information fusion. The overall process is as follows: figure 1 shown, including the following steps:
[0060] 1) Build a UAV system including various sensors. The specific method is: select a UAV (conventional model can be used), and install various sensors on the UAV, including: VIO (Visual Inertial Odometer) system, GPS, magnetometer, and barometer; wherein, the VIO system includes a camera and an IMU (inertial measurement unit), the direction of the camera lens is consistent with the forward direction of the drone, and the VIO system, GPS magnetometer, and barometer can be integ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More