

Autonomous navigation robot system used for unmapped area patrolling and navigation method thereof
A robotic system and autonomous navigation technology, applied in control/adjustment systems, two-dimensional position/channel control, instruments, etc., to reduce the probability of failure, improve operational efficiency, and reduce computing resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
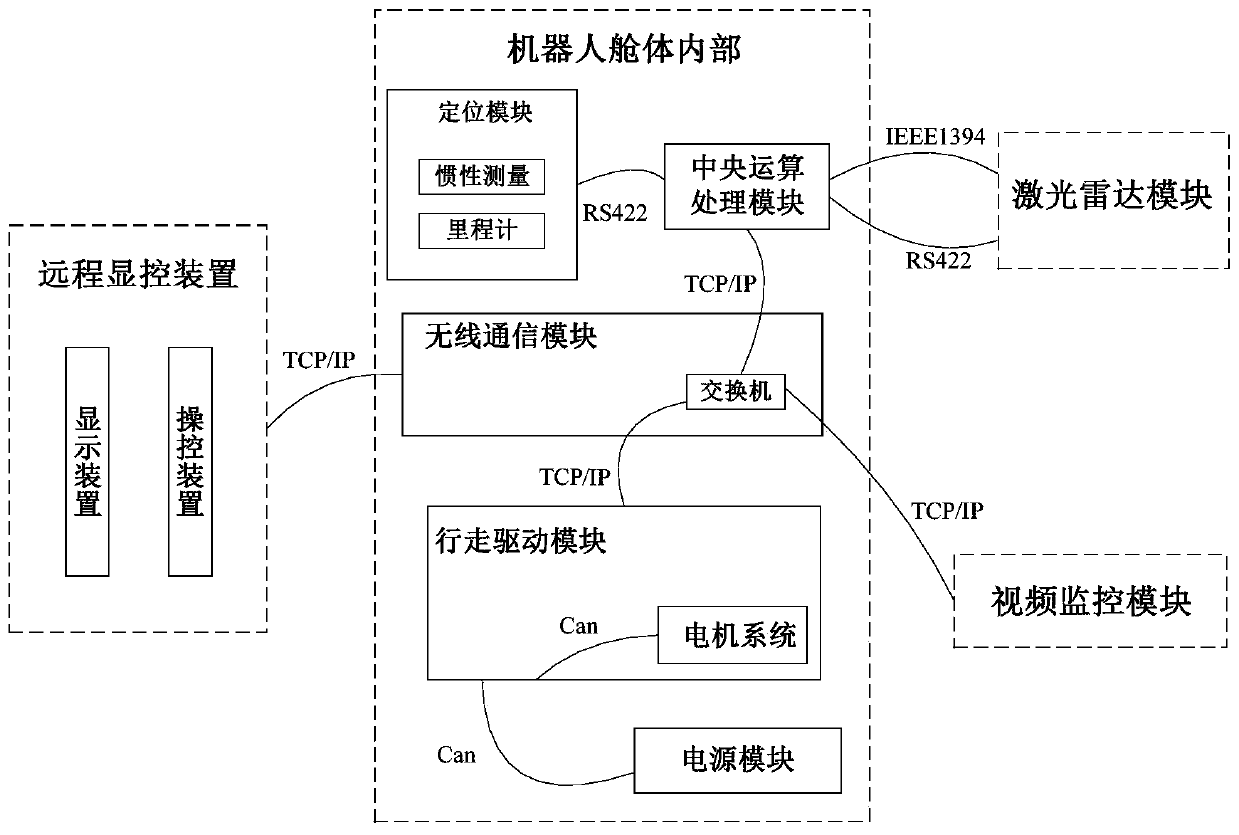
[0029] In one embodiment, combined with figure 1 , the present invention provides an autonomous navigation robot system for patrolling areas without maps. The system includes a robot body and a remote display and control device; wherein, the robot body includes a positioning module, a laser radar module, a central processing module, and a walking drive module. , video monitoring module, wireless communication module and power supply module;
[0030] The positioning module is used to obtain the position and posture information of the robot body, and transmit the informatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More