

Environment characterization method in intelligent service of service robot
A service robot and environment technology, which is applied in the field of environment representation in the intelligent service of service robots, can solve problems such as insufficient knowledge reasoning ability, high artificial participation in semantic information, and difficulty in expressing the characteristics of environmental information, so as to achieve improved capabilities and reduce The effect of artificial participation and strengthening the cognition of item relationship
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
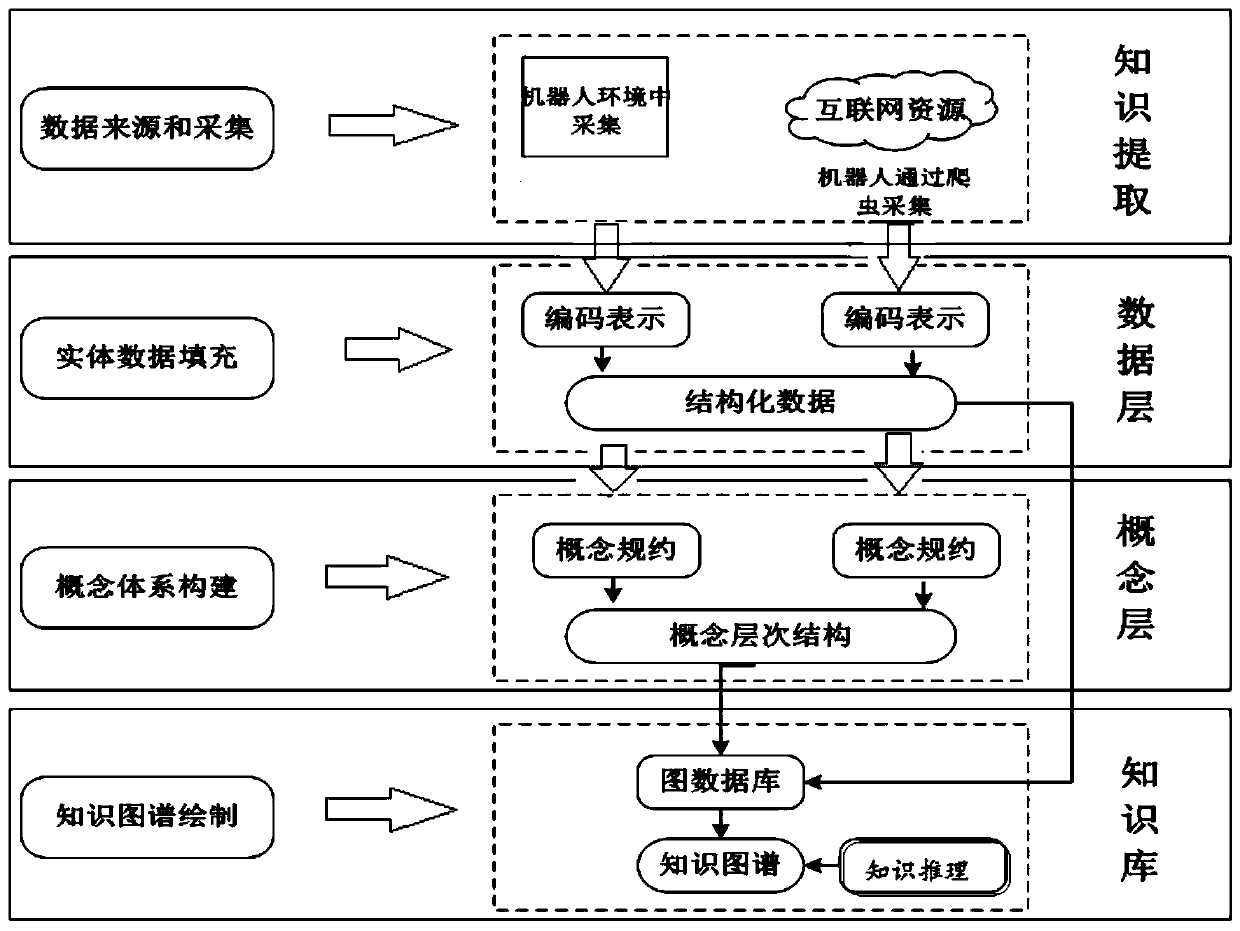
[0039] This embodiment discloses an environment representation method in the intelligent service of a service robot. A standard and standardized environmental semantic information knowledge base is constructed by using the knowledge graph. In the subsequent service process of the robot, the structured knowledge of the knowledge base can be combined with the map. together to form a semantic map for use by robots.
[0040] In the specific implementation example, the construction of the knowledge base based on the knowledge map, please refer to the attached figure 1 shown, including:
[0041] Build a knowledge base based on the knowledge graph, and combine the knowledge obtained from the Internet with environmental information to form a unified expression. The construction of the knowledge base mainly includes the construction of the data layer and the construction of the concept layer, including the acquisition of entities and the extraction of concepts, where entities refer to...
Embodiment 2
[0086] The purpose of this embodiment is to provide a computing device, which includes a memory, a processor, and a computer program stored in the memory and operable on the processor. When the processor executes the program, the method of the first embodiment is implemented. step.
Embodiment 3
[0088] The purpose of this embodiment is to provide a computer-readable storage medium.
[0089] A computer-readable storage medium stores a computer program thereon, and when the program is executed by a processor, the steps of the method in the first embodiment are executed.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More