

RGV dynamic collision avoidance control system and method based on PLC
A control method and control system technology, applied in the field of dynamic collision avoidance of RGV cars, can solve the problems of frequent fluctuations in speed, excessive safety distance, low execution efficiency, etc., and achieve the effects of strong adaptability, improved operating efficiency, and strong flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
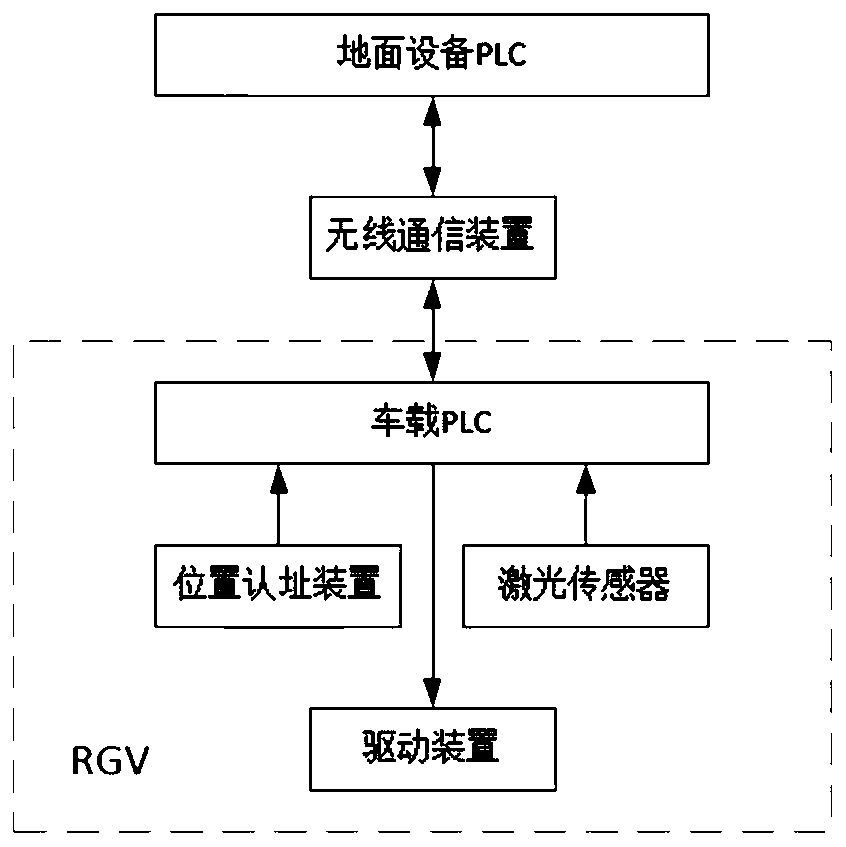
[0043] figure 1 A schematic diagram of the system hardware of the present invention is shown. This system is composed of RGV on-board PLC, location recognition device, laser sensor, drive device, ground equipment PLC and wireless communication device.
[0044] The RGV on-board PLC is used to judge the status and data of the vehicle and the adjacent RGV in real time, call the dynamic collision avoidance control method to calculate the deceleration and parking area, and then control the RGV to decelerate or stop;
[0045] The position addressing device is absolute addressing, which feeds back real-time position and speed data;
[0046] The laser sensor moves toward each other at the maximum speed according to the two RGVs, and the two vehicles brake to stop at the same time, and the deceleration and parking distance...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More