

Mine survey robot control system based on STM 32
A control system and robot technology, which is applied in the field of mine survey robots, can solve problems such as difficulty in walking, large volume and weight, and achieve the effects of improving integration, fast processing speed, and reducing volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
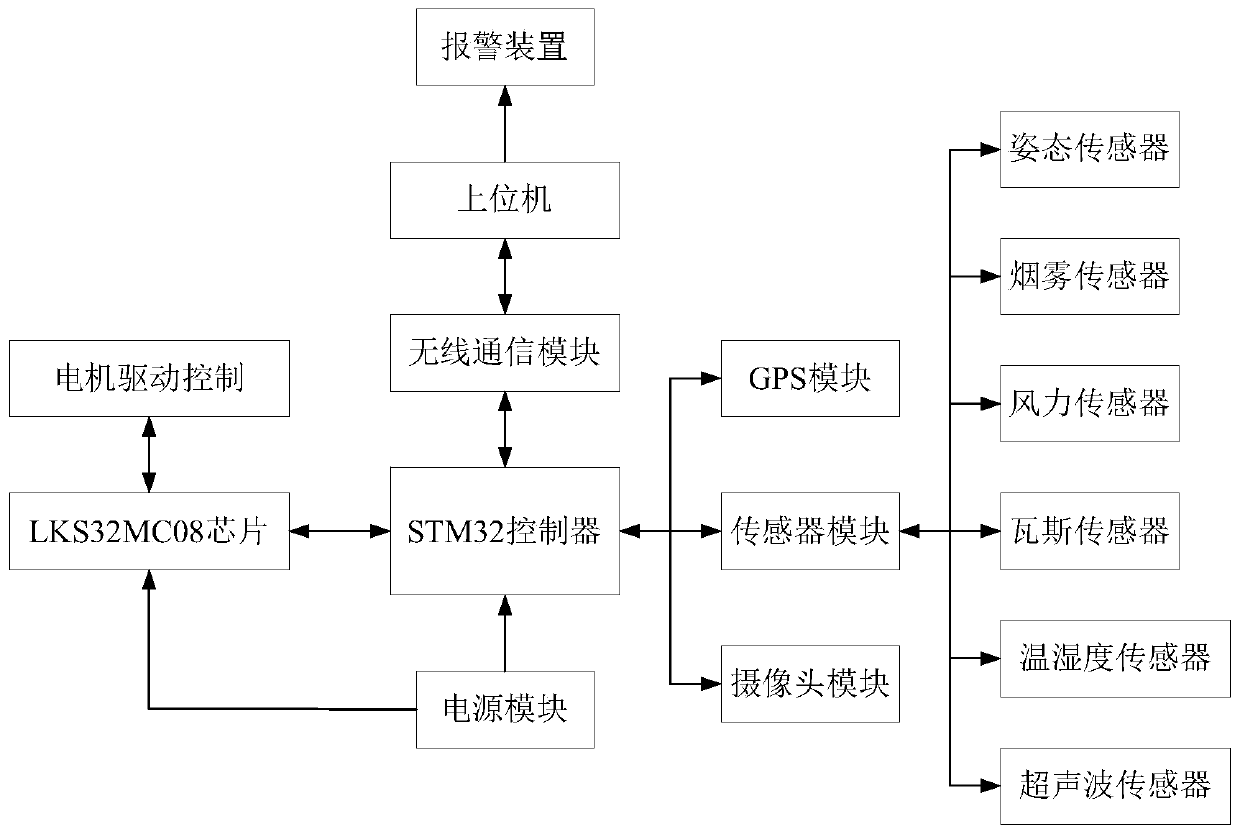
[0021] Such as figure 1 As shown, the STM32-based mine survey robot control system of the present invention includes a host computer, a wireless communication module, an STM32 controller, a sensor module, a camera module, a GPS module, a motor drive control module and a power supply module. The upper computer is used to issue motion commands, and receive and display the status information collected by the mine survey robot. The wireless communication module is used for communication between the upper computer and the STM32 controller.
[0022] The upper computer is an ordinary PC, which is equipped with a robot control interface based on the Windows platform and a driver program for the wireless communication module, which is used to realize the initialization of the robot state, and display the monitoring screen and the envi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More