

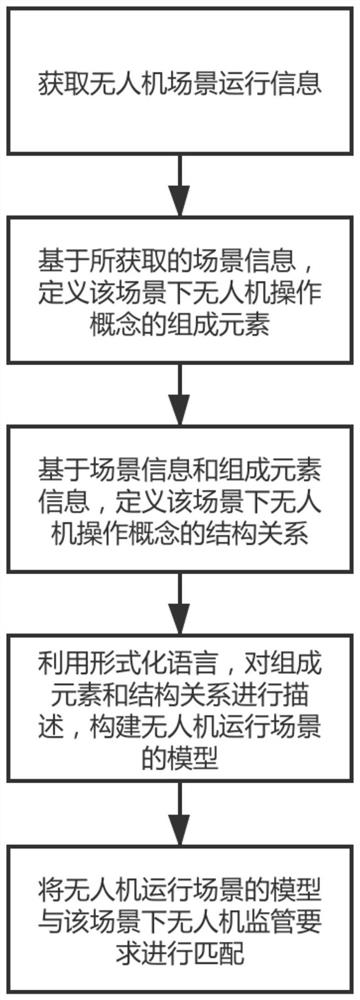
A Modeling Method for Unmanned Aerial Vehicle Operating Scenarios
A technology of operating scenarios and modeling methods, applied in the field of drones, can solve the problems of lack of formal description of drone operation concepts, etc., and achieve the effect of rich information acquisition means, precise definition and expression, and rich categories
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0095] Example 1: Construction of a solution model for a UAV monitoring system in a multi-line-of-sight scenario:
[0096] Multi-line-of-sight operation refers to the networked operation between UAVs based on the network interface. The mission execution of this UAV is within the line-of-sight of the operator, and finally the information between multiple UAVs is achieved. shared. In a multi-horizon scenario, the operator can identify the actual flight attitude, flight height, and flight direction of the drone in the air with the naked eye. The operator also needs to always pay attention to whether there are other unknown aviation aircraft in the airspace where the drone is flying. Or an unknown dangerous situation. In addition, the operator must pay attention to ensure that the drone will not pose a threat or injury to the lives and property safety of others during operation. Therefore, when the operation concept of the UAV is substituted into the parts that need to be paid at...
Embodiment 2
[0107] Embodiment 2: Construction of a demand model for UAV marine dynamic management in multiple over-the-horizon scenarios:
[0108] Compared with the operation of multi-line-of-sight drones, the difference between multi-line-of-sight and multi-line-of-sight is that it is beyond the line-of-sight range. Due to the flight beyond visual range, the naked eye of the UAV operator cannot see the state of the UAV, and cannot directly obtain the status data of the UAV that can be directly obtained when flying within the visual range. Monitoring and management system and UAV air traffic control system that meet the requirements of oceanic airspace management. The UAV air traffic control system not only includes flight route sharing and intent sharing. It is also necessary to delineate the boundaries of the area where UAVs operate, that is, to set geo-fences. Therefore, the aspects that need to be designed in the operation concept of UAVs are roughly the same as the requirements for ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More