

Computer vision-based robot walking control system and method
A technology of computer vision and walking control, which is applied in the directions of computer components, calculation, and program-controlled manipulators. It can solve the problems of being unable to accurately determine the outline of the target object, and cannot provide accurate walking navigation, etc., to achieve strong autonomy and high-precision robot navigation. method, highly biomimetic effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] In order to further understand the content, features and effects of the present invention, the following examples are given, and detailed descriptions are given below with reference to the accompanying drawings.
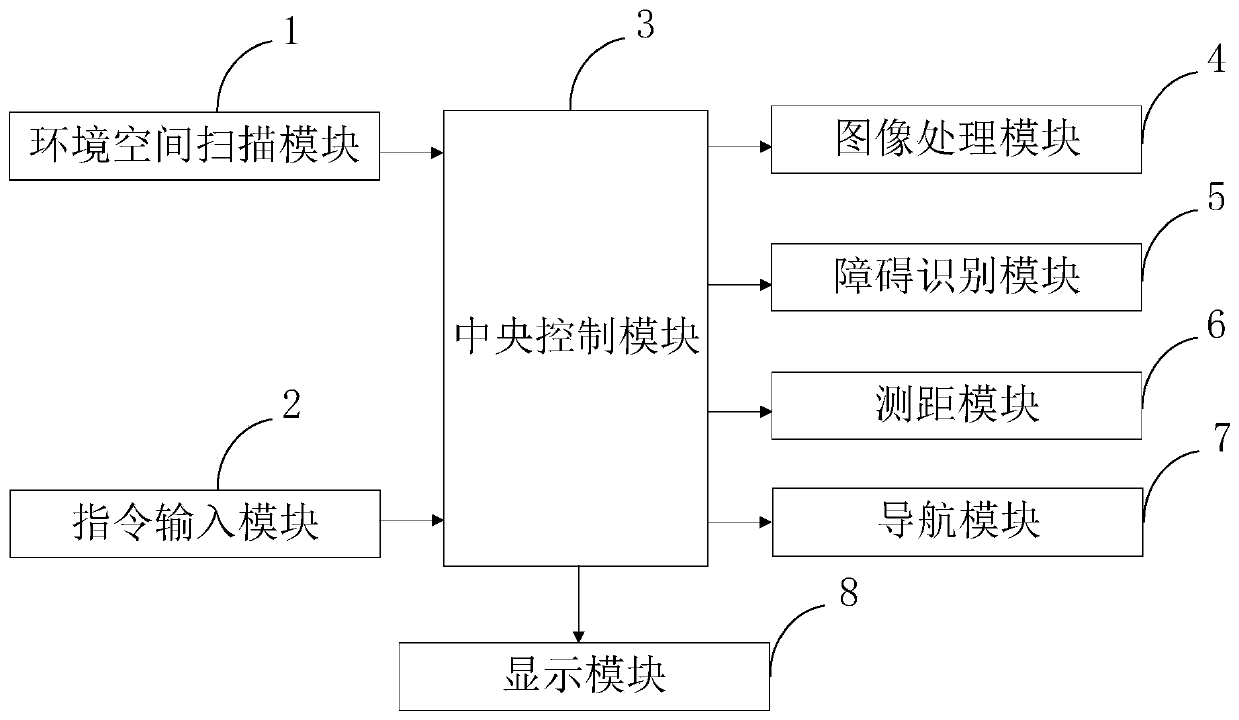
[0071] The structure of the present invention will be described in detail below in conjunction with the accompanying drawings.
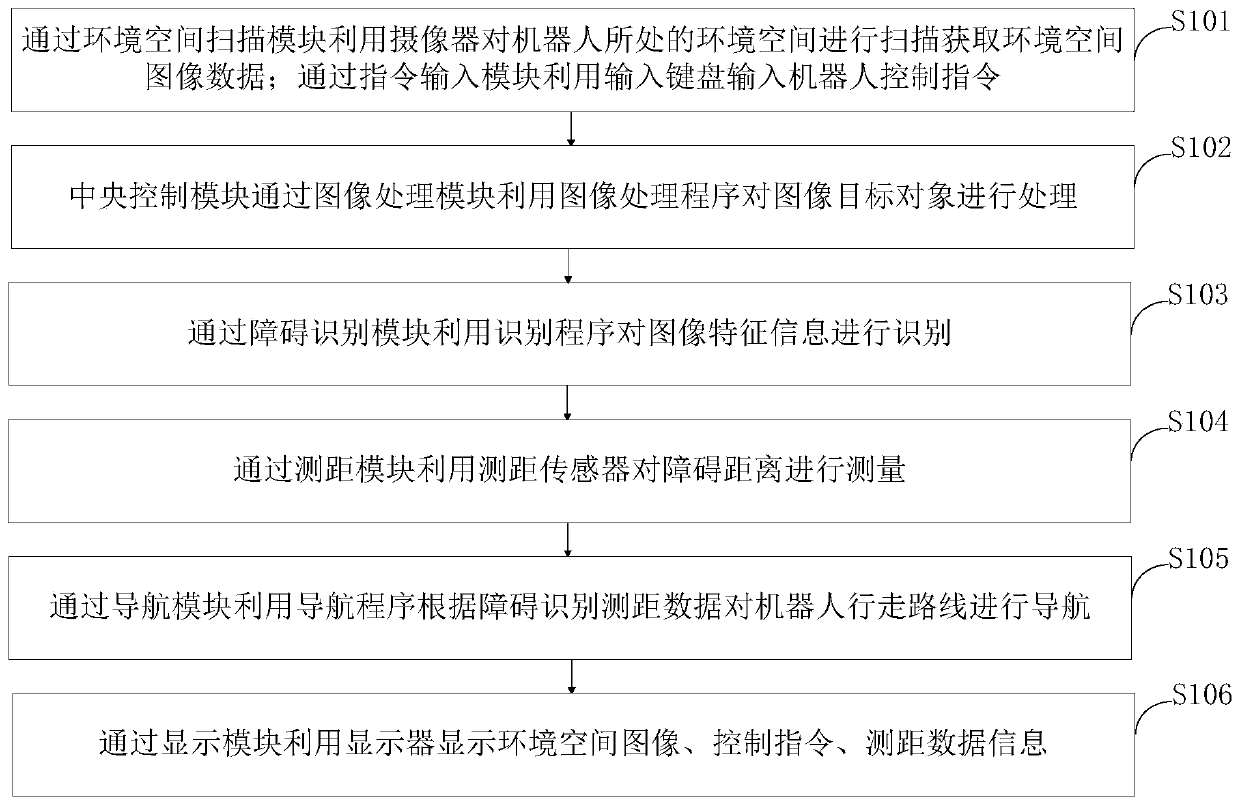
[0072] Such as figure 1 As shown, the robot walking control method based on computer vision provided by the invention comprises the following steps:
[0073] S101, using the camera to scan the environmental space where the robot is located through the environmental space scanning module to obtain image data of the environmental space; using the input keyboard to input robot control instructions through the instruction input module;
[0074] S102, the central control module uses an image processing program to process the image target object through the image processing module;
[0075] S103, using a recognition program to recognize ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More