Automatic guide method for detecting and controlling driving direction and position based on all wheel speed and forklift system thereof
A technology of speed detection and driving direction, applied in the field of automatic guidance method and its forklift system, which can solve the problems of driving speed limit, inaccurate positioning, rushing through the cargo space, etc., and achieve the effect of real-time range and stability assurance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0030] The invention provides a technical solution:
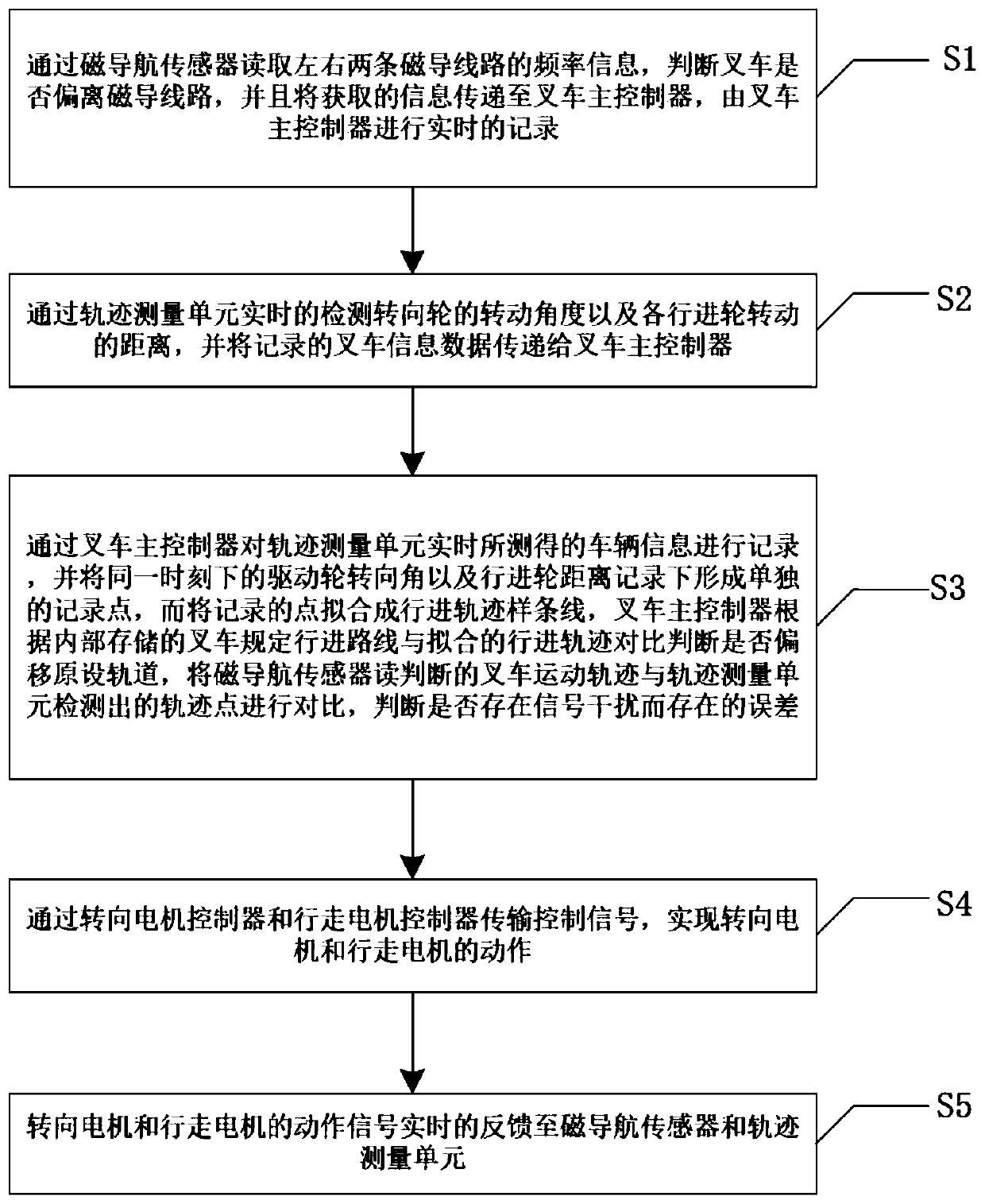
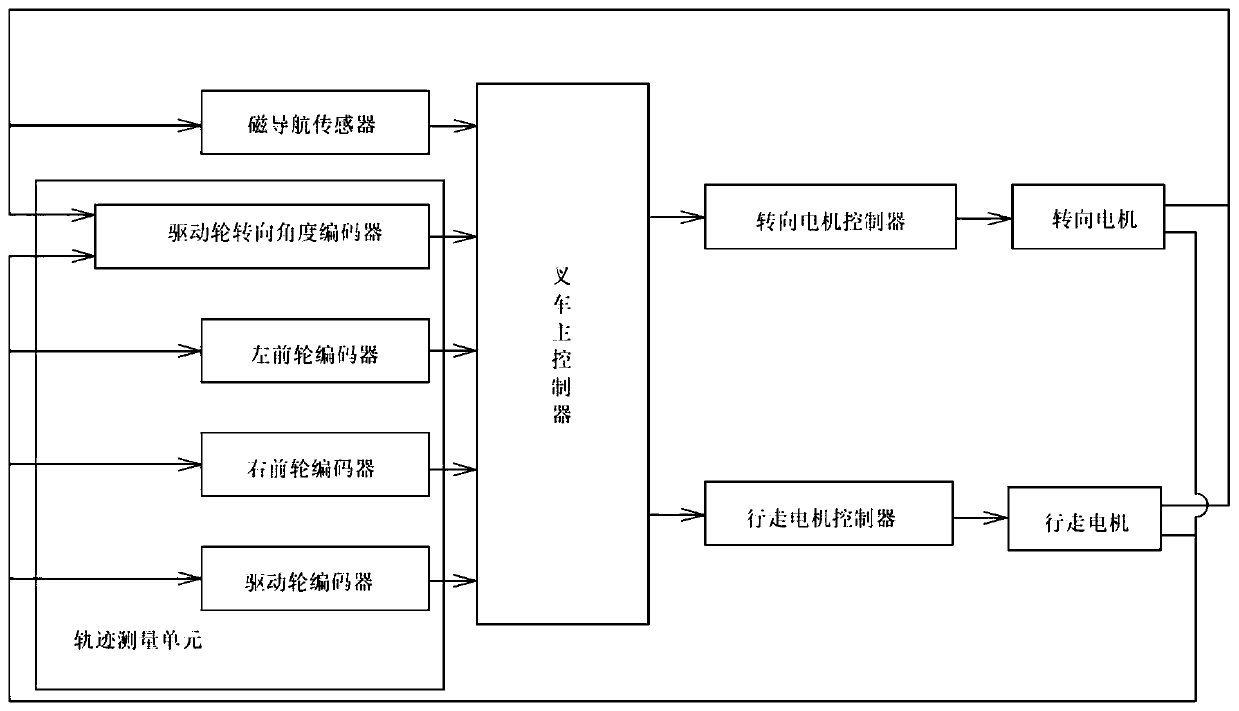
[0031] refer to figure 1 and figure 2 , an automatic guidance method for controlling the driving direction and position based on all-wheel speed detection, comprising the following steps:
[0032] S1, read the frequency information of the magnetic permeation line laid on the ground through the magnetic navigation sensors installed on the front and rear sides of the forklift. If one of the two front and rear magnetic navigation sensors cannot receive the frequency information of the magnetic permeation line, the forklift When an offset occurs, judge whether the forklift deviates from the magnetic conduction line, and then transmit the obtained information to the main controller of the forklift, and the main controller of the forklift will record it in real time;
[0033] S2, through the driving wheel steering angle encoder in the trajectory measurement unit to detect the steering wheel rotation angle in real time, wherein...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More